 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResolution Complete In-Place Object Retrieval given Known Object Models
Mar 25, 2023This work proposes a robot task planning framework for retrieving a target object in a confined workspace among multiple stacked objects that obstruct the target. The robot can use prehensile picking and in-workspace placing actions. The method assumes access to 3D models for the visible objects in the scene. The key contribution is in achieving desirable properties, i.e., to provide (a) safety, by avoiding collisions with sensed obstacles, objects, and occluded regions, and (b) resolution completeness (RC) - or probabilistic completeness (PC) depending on implementation - which indicates a solution will be eventually found (if it exists) as the resolution of algorithmic parameters increases. A heuristic variant of the basic RC algorithm is also proposed to solve the task more efficiently while retaining the desirable properties. Simulation results compare using random picking and placing operations against the basic RC algorithm that reasons about object dependency as well as its heuristic variant. The success rate is higher for the RC approaches given the same amount of time. The heuristic variant is able to solve the problem even more efficiently than the basic approach. The integration of the RC algorithm with perception, where an RGB-D sensor detects the objects as they are being moved, enables real robot demonstrations of safely retrieving target objects from a cluttered shelf.
Persistent Homology Guided Monte-Carlo Tree Search for Effective Non-Prehensile Manipulation
Oct 04, 2022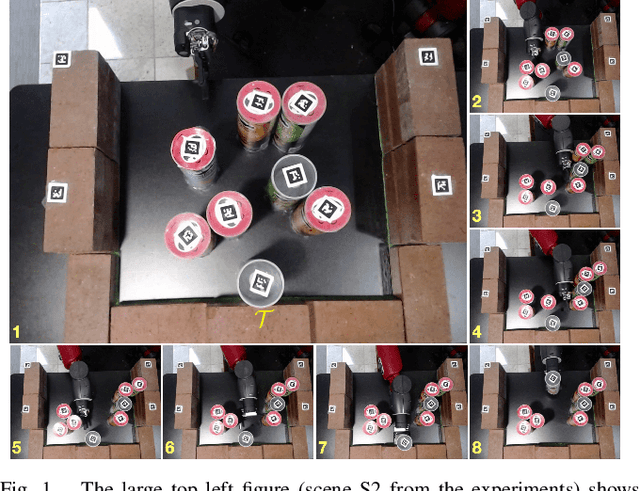
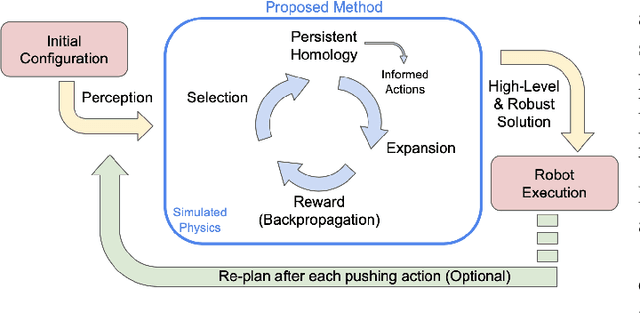
Performing object retrieval tasks in messy real-world workspaces involves the challenges of \emph{uncertainty} and \emph{clutter}. One option is to solve retrieval problems via a sequence of prehensile pick-n-place operations, which can be computationally expensive to compute in highly-cluttered scenarios and also inefficient to execute. The proposed framework selects the option of performing non-prehensile actions, such as pushing, to clean a cluttered workspace to allow a robotic arm to retrieve a target object. Non-prehensile actions, allow to interact simultaneously with multiple objects, which can speed up execution. At the same time, they can significantly increase uncertainty as it is not easy to accurately estimate the outcome of a pushing operation in clutter. The proposed framework integrates topological tools and Monte-Carlo tree search to achieve effective and robust pushing for object retrieval problems. In particular, it proposes using persistent homology to automatically identify manageable clustering of blocking objects in the workspace without the need for manually adjusting hyper-parameters. Furthermore, MCTS uses this information to explore feasible actions to push groups of objects together, aiming to minimize the number of pushing actions needed to clear the path to the target object. Real-world experiments using a Baxter robot, which involves some noise in actuation, show that the proposed framework achieves a higher success rate in solving retrieval tasks in dense clutter compared to state-of-the-art alternatives. Moreover, it produces high-quality solutions with a small number of pushing actions improving the overall execution time. More critically, it is robust enough that it allows to plan the sequence of actions offline and then execute them reliably online with Baxter.
Persistent Homology for Effective Non-Prehensile Manipulation
Feb 07, 2022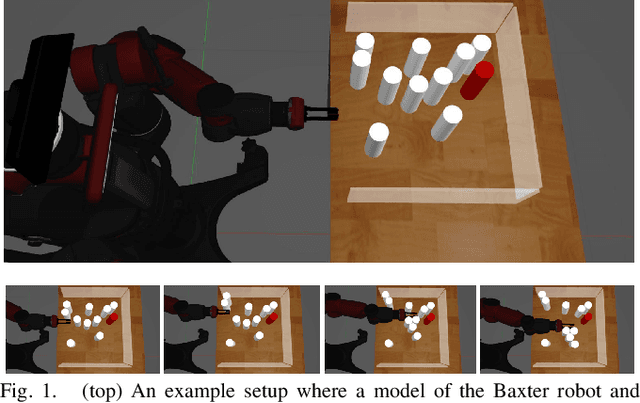
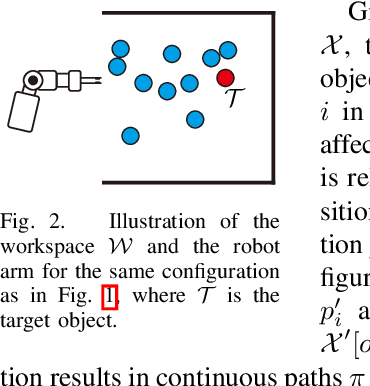
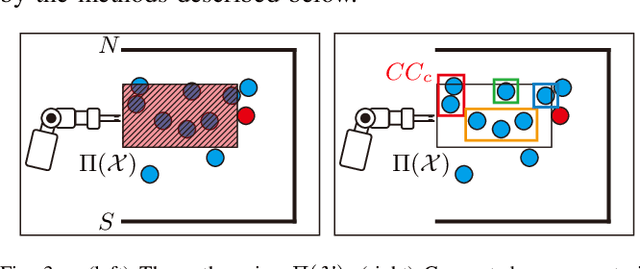
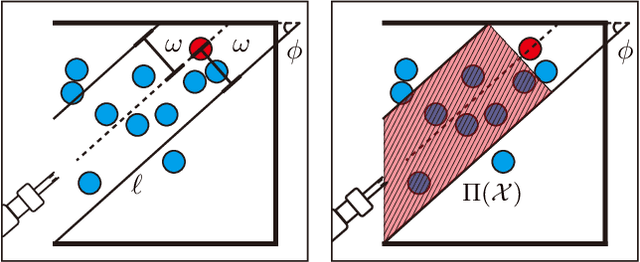
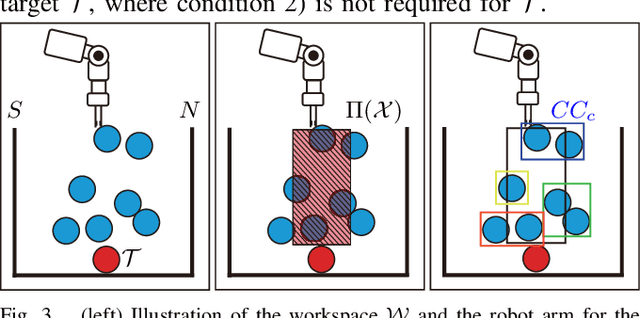
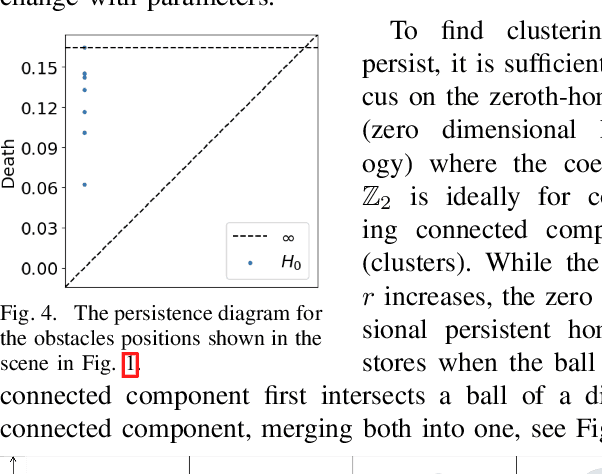
This work explores the use of topological tools for achieving effective non-prehensile manipulation in cluttered, constrained workspaces. In particular, it proposes the use of persistent homology as a guiding principle in identifying the appropriate non-prehensile actions, such as pushing, to clean a cluttered space with a robotic arm so as to allow the retrieval of a target object. Persistent homology enables the automatic identification of connected components of blocking objects in the space without the need for manual input or tuning of parameters. The proposed algorithm uses this information to push groups of cylindrical objects together and aims to minimize the number of pushing actions needed to reach to the target. Simulated experiments in a physics engine using a model of the Baxter robot show that the proposed topology-driven solution is achieving significantly higher success rate in solving such constrained problems relatively to state-of-the-art alternatives from the literature. It manages to keep the number of pushing actions low, is computationally efficient and the resulting decisions and motion appear natural for effectively solving such tasks.
Uniform Object Rearrangement: From Complete Monotone Primitives to Efficient Non-Monotone Informed Search
Jan 28, 2021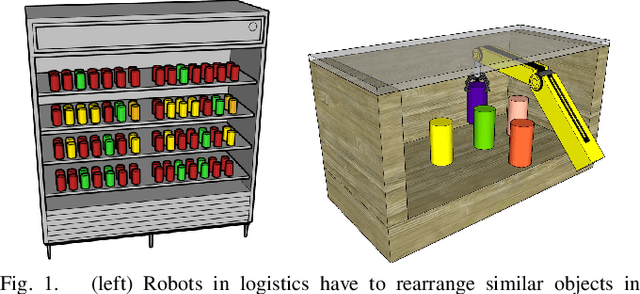

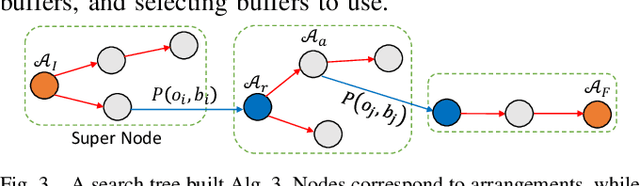
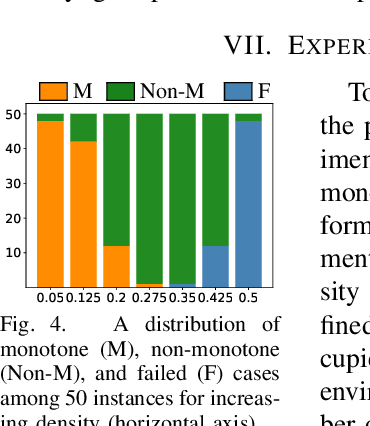
Object rearrangement is a widely-applicable and challenging task for robots. Geometric constraints must be carefully examined to avoid collisions and combinatorial issues arise as the number of objects increases. This work studies the algorithmic structure of rearranging uniform objects, where robot-object collisions do not occur but object-object collisions have to be avoided. The objective is minimizing the number of object transfers under the assumption that the robot can manipulate one object at a time. An efficiently computable decomposition of the configuration space is used to create a "region graph", which classifies all continuous paths of equivalent collision possibilities. Based on this compact but rich representation, a complete dynamic programming primitive DFSDP performs a recursive depth first search to solve monotone problems quickly, i.e., those instances that do not require objects to be moved first to an intermediate buffer. DFSDP is extended to solve single-buffer, non-monotone instances, given a choice of an object and a buffer. This work utilizes these primitives as local planners in an informed search framework for more general, non-monotone instances. The search utilizes partial solutions from the primitives to identify the most promising choice of objects and buffers. Experiments demonstrate that the proposed solution returns near-optimal paths with higher success rate, even for challenging non-monotone instances, than other leading alternatives.