 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoomShift: Room-scale Dynamic Haptics for VR with Furniture-moving Swarm Robots
Aug 19, 2020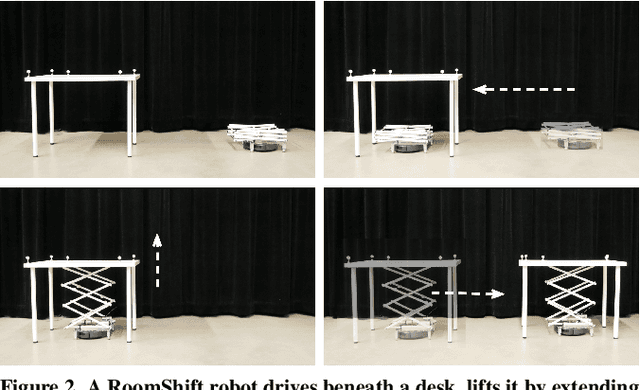
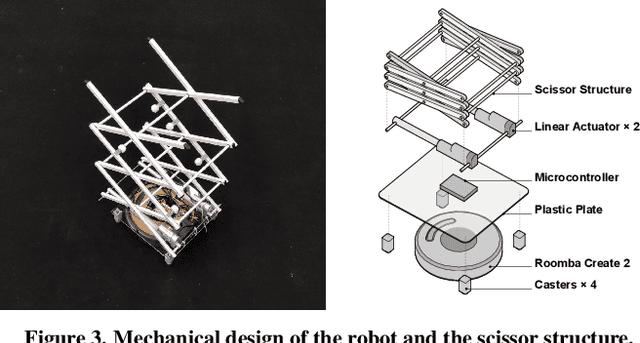
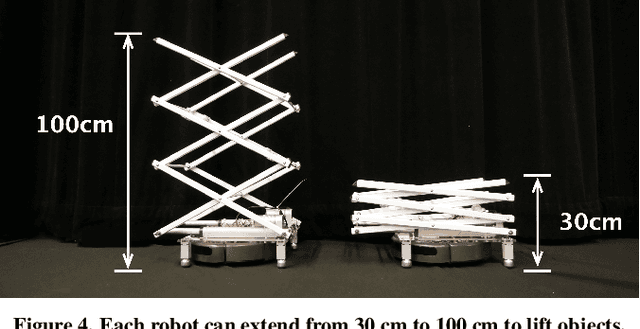

RoomShift is a room-scale dynamic haptic environment for virtual reality, using a small swarm of robots that can move furniture. RoomShift consists of nine shape-changing robots: Roombas with mechanical scissor lifts. These robots drive beneath a piece of furniture to lift, move and place it. By augmenting virtual scenes with physical objects, users can sit on, lean against, place and otherwise interact with furniture with their whole body; just as in the real world. When the virtual scene changes or users navigate within it, the swarm of robots dynamically reconfigures the physical environment to match the virtual content. We describe the hardware and software implementation, applications in virtual tours and architectural design and interaction techniques.
PufferBot: Actuated Expandable Structures for Aerial Robots
Aug 17, 2020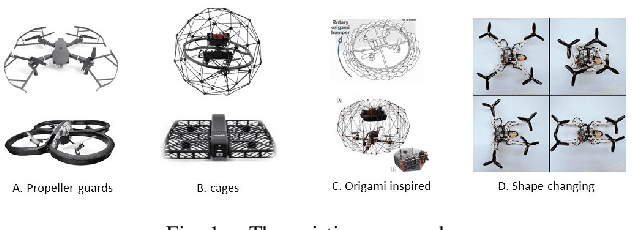
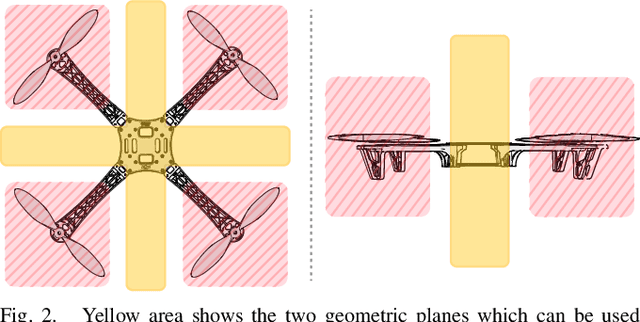
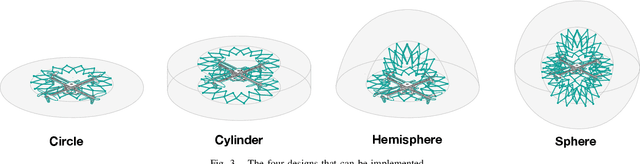
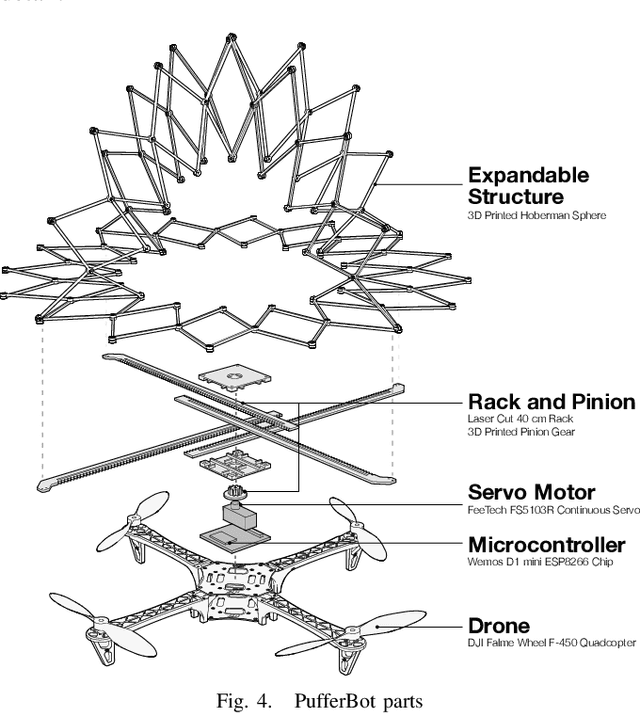
We present PufferBot, an aerial robot with an expandable structure that may expand to protect a drone's propellers when the robot is close to obstacles or collocated humans. PufferBot is made of a custom 3D-printed expandable scissor structure, which utilizes a one degree of freedom actuator with rack and pinion mechanism. We propose four designs for the expandable structure, each with unique characterizations for different situations. Finally, we present three motivating scenarios in which PufferBot may extend the utility of existing static propeller guard structures. The supplementary video can be found at: https://youtu.be/XtPepCxWcBg
LiftTiles: Constructive Building Blocks for Prototyping Room-scale Shape-changing Interfaces
Jan 08, 2020


Large-scale shape-changing interfaces have great potential, but creating such systems requires substantial time, cost, space, and efforts, which hinders the research community to explore interactions beyond the scale of human hands. We introduce modular inflatable actuators as building blocks for prototyping room-scale shape-changing interfaces. Each actuator can change its height from 15cm to 150cm, actuated and controlled by air pressure. Each unit is low-cost (8 USD), lightweight (10 kg), compact (15 cm), and robust, making it well-suited for prototyping room-scale shape transformations. Moreover, our modular and reconfigurable design allows researchers and designers to quickly construct different geometries and to explore various applications. This paper contributes to the design and implementation of highly extendable inflatable actuators, and demonstrates a range of scenarios that can leverage this modular building block.
ShapeBots: Shape-changing Swarm Robots
Sep 08, 2019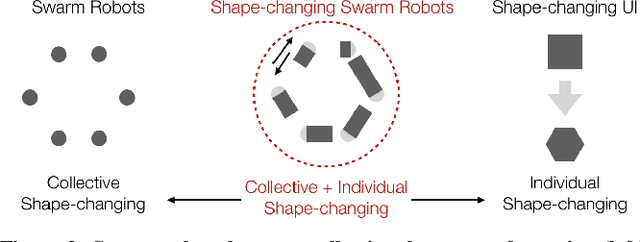
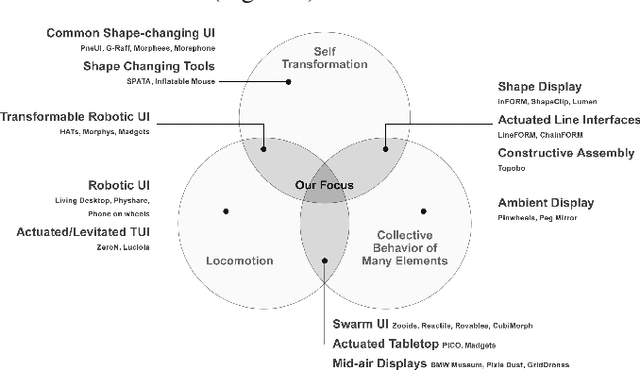
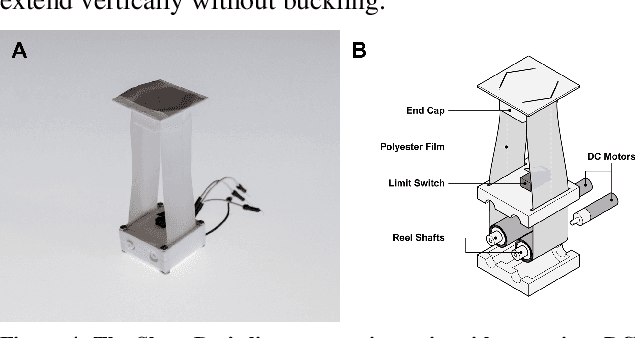
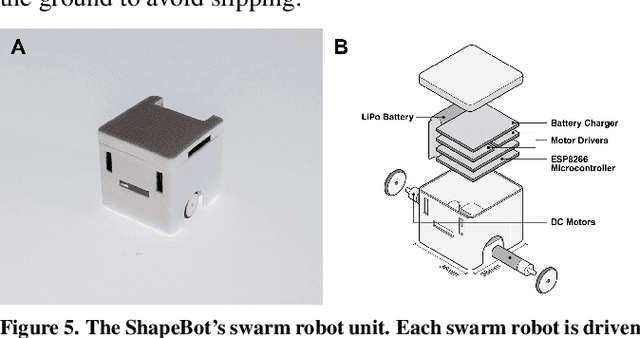
We introduce shape-changing swarm robots. A swarm of self-transformable robots can both individually and collectively change their configuration to display information, actuate objects, act as tangible controllers, visualize data, and provide physical affordances. ShapeBots is a concept prototype of shape-changing swarm robots. Each robot can change its shape by leveraging small linear actuators that are thin (2.5 cm) and highly extendable (up to 20cm) in both horizontal and vertical directions. The modular design of each actuator enables various shapes and geometries of self-transformation. We illustrate potential application scenarios and discuss how this type of interface opens up possibilities for the future of ubiquitous and distributed shape-changing interfaces.