 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMR-DAW: Towards Collaborative Digital Audio Workstations in Mixed Reality
Jan 01, 2026Digital Audio Workstations (DAWs) are central to modern music production but often encumber the musician's workflow, tethering them to a desk and hindering natural interaction with their instrument. Furthermore, effective remote collaboration remains a significant challenge, with existing solutions hampered by network latency and asynchronous file sharing. This paper investigates the potential of Mixed Reality (MR) to overcome these barriers, creating an intuitive environment for real-time, remote musical collaboration. We employ qualitative and speculative design techniques to better understand: 1) how players currently use DAWs, and 2) to imagine a speculative future of collaborative MR-DAWs. To facilitate this discussion, we developed and evaluated the usability of a design probe, MR-DAW. An MR system enabling multiple, geographically dispersed users to control a single, shared DAW instance while moving freely in their local spaces. Our networked system enables each remote musician to use a physical foot pedal for collaborative looping, merging a familiar, hands-free interaction with a shared virtual session. Based on interviews and system evaluations with 20 musicians, we analyze current practices, report on the user experience with our MR system, and speculate on the future of musical collaboration in MR. Our results highlight the affordances of MR for unencumbered musical interaction and provide a speculative outlook on the future of remote collaborative DAWs in the Musical Metaverse.
Stringesthesia: Dynamically Shifting Musical Agency Between Audience and Performer Based on Trust in an Interactive and Improvised Performance
Sep 11, 2023This paper introduces Stringesthesia, an interactive and improvised performance paradigm. Stringesthesia uses real-time neuroimaging to connect performers and audiences, enabling direct access to the performers mental state and determining audience participation during the performance. Functional near-infrared spectroscopy, or fNIRS, a noninvasive neuroimaging tool, was used to assess metabolic activity of brain areas collectively associated with a metric we call trust. A visualization representing the real-time measurement of the performers level of trust was projected behind the performer and used to dynamically restrict or promote audience participation. Throughout the paper we discuss prior work that heavily influenced our design, conceptual and methodological issues with using fNIRS technology, system architecture, and feedback from the audience and performer.
RoomShift: Room-scale Dynamic Haptics for VR with Furniture-moving Swarm Robots
Aug 19, 2020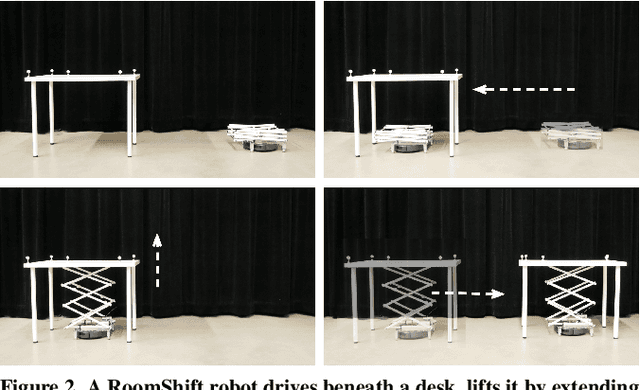
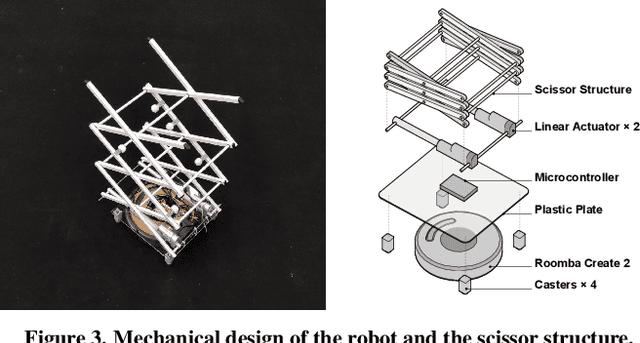
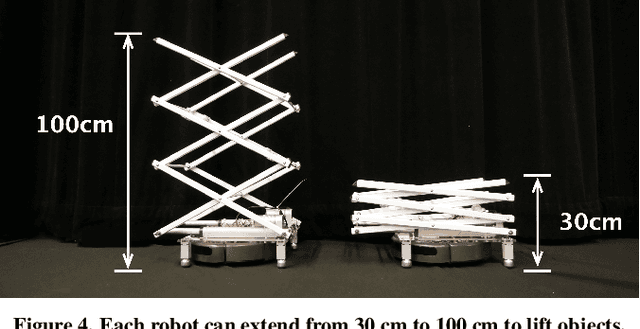

RoomShift is a room-scale dynamic haptic environment for virtual reality, using a small swarm of robots that can move furniture. RoomShift consists of nine shape-changing robots: Roombas with mechanical scissor lifts. These robots drive beneath a piece of furniture to lift, move and place it. By augmenting virtual scenes with physical objects, users can sit on, lean against, place and otherwise interact with furniture with their whole body; just as in the real world. When the virtual scene changes or users navigate within it, the swarm of robots dynamically reconfigures the physical environment to match the virtual content. We describe the hardware and software implementation, applications in virtual tours and architectural design and interaction techniques.
ShapeBots: Shape-changing Swarm Robots
Sep 08, 2019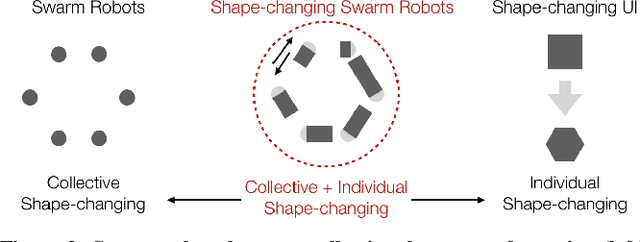
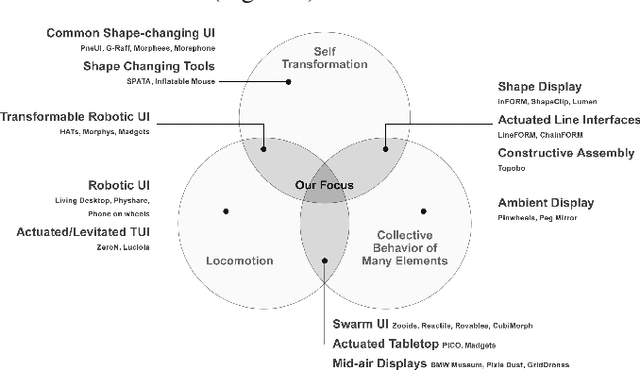
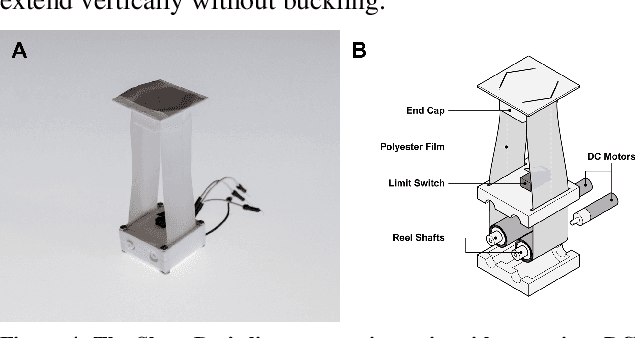
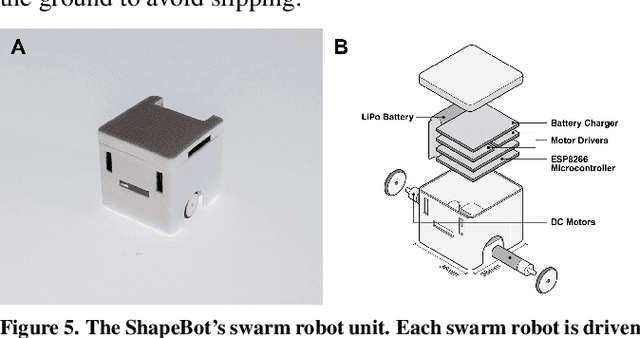
We introduce shape-changing swarm robots. A swarm of self-transformable robots can both individually and collectively change their configuration to display information, actuate objects, act as tangible controllers, visualize data, and provide physical affordances. ShapeBots is a concept prototype of shape-changing swarm robots. Each robot can change its shape by leveraging small linear actuators that are thin (2.5 cm) and highly extendable (up to 20cm) in both horizontal and vertical directions. The modular design of each actuator enables various shapes and geometries of self-transformation. We illustrate potential application scenarios and discuss how this type of interface opens up possibilities for the future of ubiquitous and distributed shape-changing interfaces.