 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented Reality and Robotics: A Survey and Taxonomy for AR-enhanced Human-Robot Interaction and Robotic Interfaces
Mar 07, 2022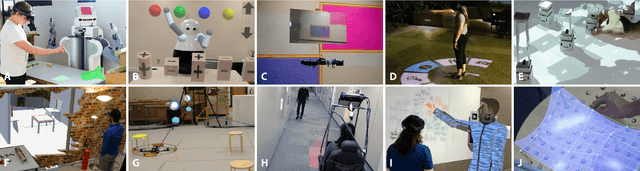
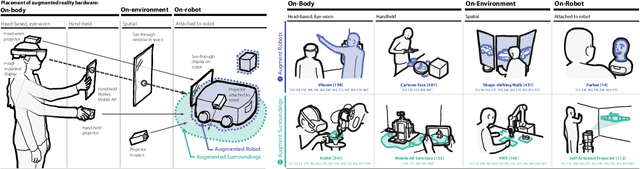
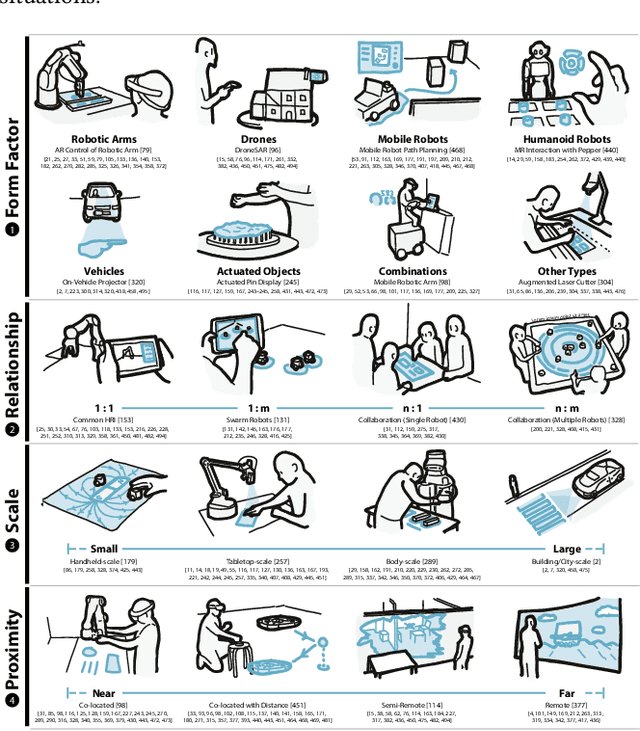

This paper contributes to a taxonomy of augmented reality and robotics based on a survey of 460 research papers. Augmented and mixed reality (AR/MR) have emerged as a new way to enhance human-robot interaction (HRI) and robotic interfaces (e.g., actuated and shape-changing interfaces). Recently, an increasing number of studies in HCI, HRI, and robotics have demonstrated how AR enables better interactions between people and robots. However, often research remains focused on individual explorations and key design strategies, and research questions are rarely analyzed systematically. In this paper, we synthesize and categorize this research field in the following dimensions: 1) approaches to augmenting reality; 2) characteristics of robots; 3) purposes and benefits; 4) classification of presented information; 5) design components and strategies for visual augmentation; 6) interaction techniques and modalities; 7) application domains; and 8) evaluation strategies. We formulate key challenges and opportunities to guide and inform future research in AR and robotics.
RoomShift: Room-scale Dynamic Haptics for VR with Furniture-moving Swarm Robots
Aug 19, 2020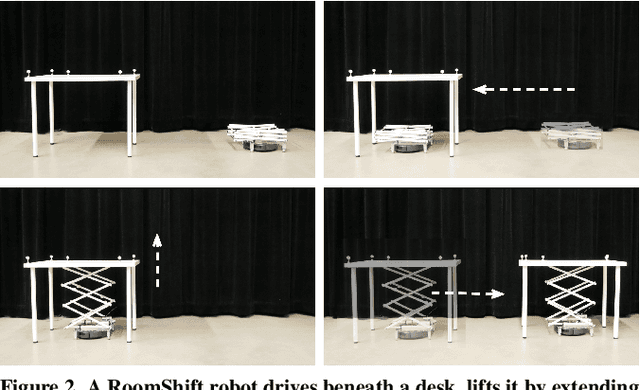
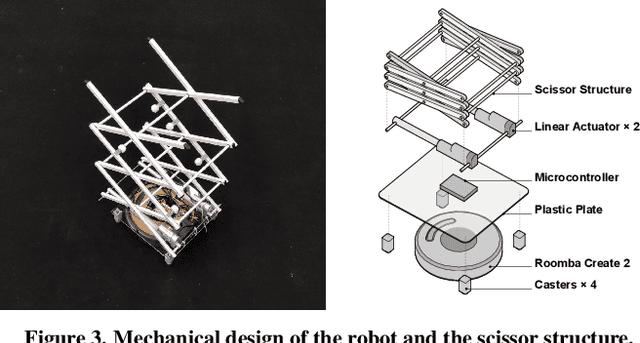
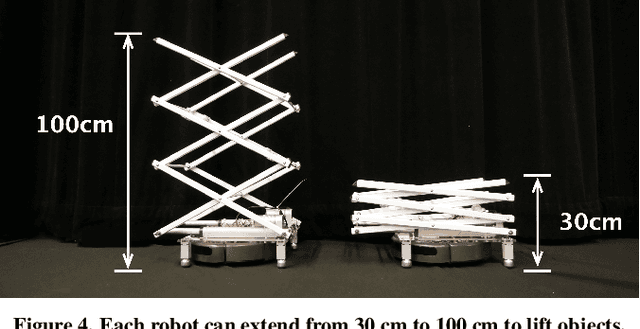

RoomShift is a room-scale dynamic haptic environment for virtual reality, using a small swarm of robots that can move furniture. RoomShift consists of nine shape-changing robots: Roombas with mechanical scissor lifts. These robots drive beneath a piece of furniture to lift, move and place it. By augmenting virtual scenes with physical objects, users can sit on, lean against, place and otherwise interact with furniture with their whole body; just as in the real world. When the virtual scene changes or users navigate within it, the swarm of robots dynamically reconfigures the physical environment to match the virtual content. We describe the hardware and software implementation, applications in virtual tours and architectural design and interaction techniques.
REFORM: Recognizing F-formations for Social Robots
Aug 17, 2020
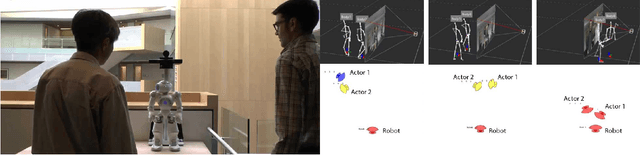
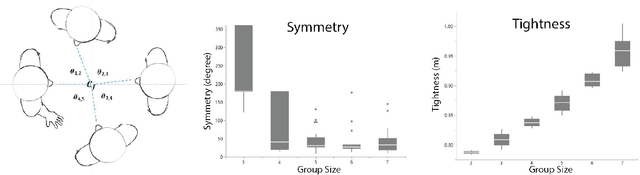

Recognizing and understanding conversational groups, or F-formations, is a critical task for situated agents designed to interact with humans. F-formations contain complex structures and dynamics, yet are used intuitively by people in everyday face-to-face conversations. Prior research exploring ways of identifying F-formations has largely relied on heuristic algorithms that may not capture the rich dynamic behaviors employed by humans. We introduce REFORM (REcognize F-FORmations with Machine learning), a data-driven approach for detecting F-formations given human and agent positions and orientations. REFORM decomposes the scene into all possible pairs and then reconstructs F-formations with a voting-based scheme. We evaluated our approach across three datasets: the SALSA dataset, a newly collected human-only dataset, and a new set of acted human-robot scenarios, and found that REFORM yielded improved accuracy over a state-of-the-art F-formation detection algorithm. We also introduce symmetry and tightness as quantitative measures to characterize F-formations. Supplementary video: https://youtu.be/Fp7ETdkKvdA , Dataset available at: github.com/cu-ironlab/Babble
PufferBot: Actuated Expandable Structures for Aerial Robots
Aug 17, 2020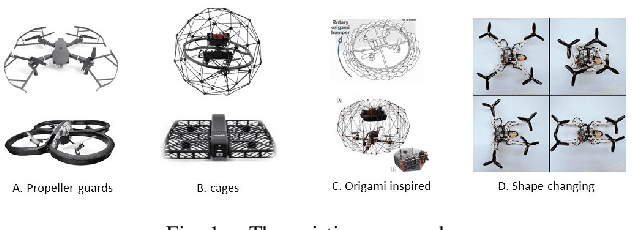
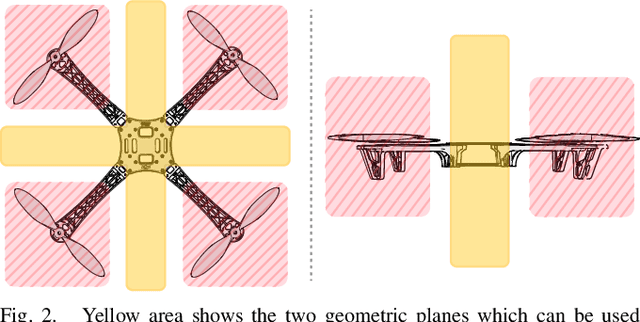
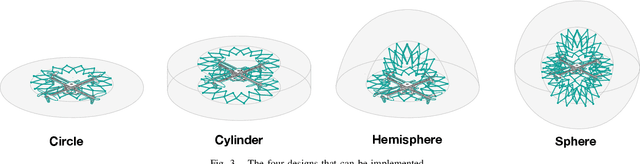
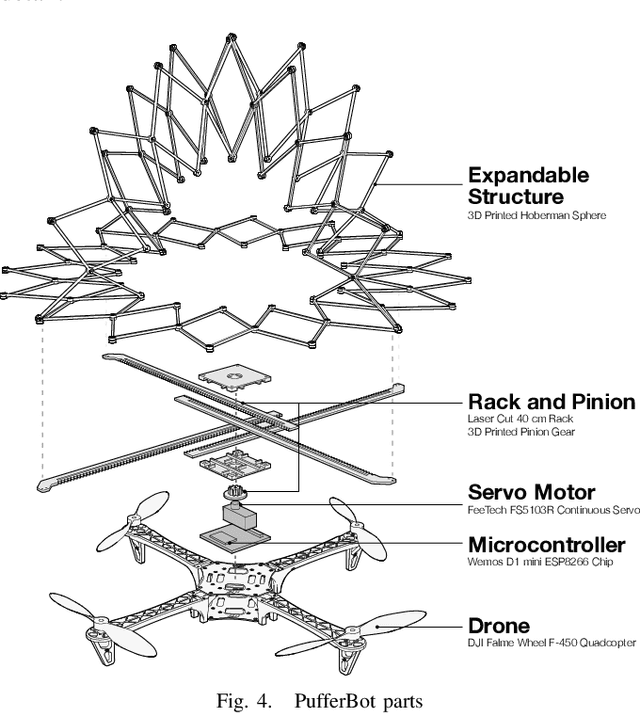
We present PufferBot, an aerial robot with an expandable structure that may expand to protect a drone's propellers when the robot is close to obstacles or collocated humans. PufferBot is made of a custom 3D-printed expandable scissor structure, which utilizes a one degree of freedom actuator with rack and pinion mechanism. We propose four designs for the expandable structure, each with unique characterizations for different situations. Finally, we present three motivating scenarios in which PufferBot may extend the utility of existing static propeller guard structures. The supplementary video can be found at: https://youtu.be/XtPepCxWcBg