 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetricNet: Recovering Metric Scale in Generative Navigation Policies
Sep 17, 2025Generative navigation policies have made rapid progress in improving end-to-end learned navigation. Despite their promising results, this paradigm has two structural problems. First, the sampled trajectories exist in an abstract, unscaled space without metric grounding. Second, the control strategy discards the full path, instead moving directly towards a single waypoint. This leads to short-sighted and unsafe actions, moving the robot towards obstacles that a complete and correctly scaled path would circumvent. To address these issues, we propose MetricNet, an effective add-on for generative navigation that predicts the metric distance between waypoints, grounding policy outputs in real-world coordinates. We evaluate our method in simulation with a new benchmarking framework and show that executing MetricNet-scaled waypoints significantly improves both navigation and exploration performance. Beyond simulation, we further validate our approach in real-world experiments. Finally, we propose MetricNav, which integrates MetricNet into a navigation policy to guide the robot away from obstacles while still moving towards the goal.
REGRACE: A Robust and Efficient Graph-based Re-localization Algorithm using Consistency Evaluation
Mar 05, 2025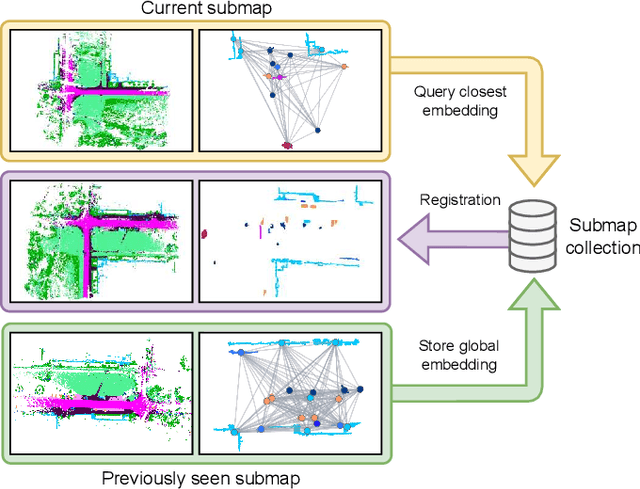
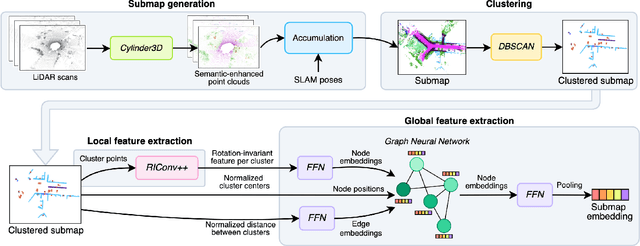
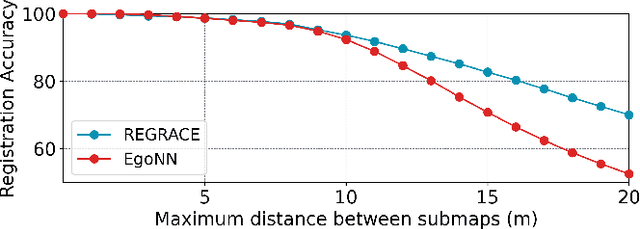
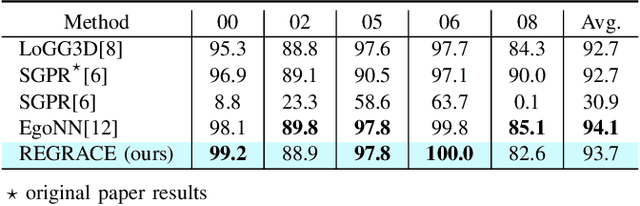
Loop closures are essential for correcting odometry drift and creating consistent maps, especially in the context of large-scale navigation. Current methods using dense point clouds for accurate place recognition do not scale well due to computationally expensive scan-to-scan comparisons. Alternative object-centric approaches are more efficient but often struggle with sensitivity to viewpoint variation. In this work, we introduce REGRACE, a novel approach that addresses these challenges of scalability and perspective difference in re-localization by using LiDAR-based submaps. We introduce rotation-invariant features for each labeled object and enhance them with neighborhood context through a graph neural network. To identify potential revisits, we employ a scalable bag-of-words approach, pooling one learned global feature per submap. Additionally, we define a revisit with geometrical consistency cues rather than embedding distance, allowing us to recognize far-away loop closures. Our evaluations demonstrate that REGRACE achieves similar results compared to state-of-the-art place recognition and registration baselines while being twice as fast.