 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrimate-like perceptual decision making emerges through deep recurrent reinforcement learning
Jan 18, 2026Progress has led to a detailed understanding of the neural mechanisms that underlie decision making in primates. However, less is known about why such mechanisms are present in the first place. Theory suggests that primate decision making mechanisms, and their resultant behavioral abilities, emerged to maximize reward in the face of noisy, temporally evolving information. To test this theory, we trained an end-to-end deep recurrent neural network using reinforcement learning on a noisy perceptual discrimination task. Networks learned several key abilities of primate-like decision making including trading off speed for accuracy, and flexibly changing their mind in the face of new information. Internal dynamics of these networks suggest that these abilities were supported by similar decision mechanisms as those observed in primate neurophysiological studies. These results provide experimental support for key pressures that gave rise to the primate ability to make flexible decisions.
Joint Action is a Framework for Understanding Partnerships Between Humans and Upper Limb Prostheses
Dec 28, 2022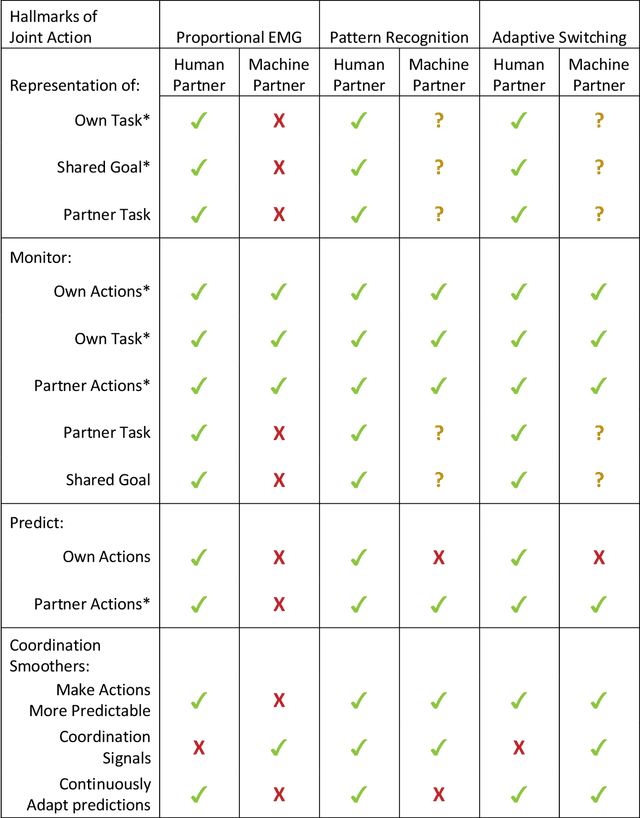
Recent advances in upper limb prostheses have led to significant improvements in the number of movements provided by the robotic limb. However, the method for controlling multiple degrees of freedom via user-generated signals remains challenging. To address this issue, various machine learning controllers have been developed to better predict movement intent. As these controllers become more intelligent and take on more autonomy in the system, the traditional approach of representing the human-machine interface as a human controlling a tool becomes limiting. One possible approach to improve the understanding of these interfaces is to model them as collaborative, multi-agent systems through the lens of joint action. The field of joint action has been commonly applied to two human partners who are trying to work jointly together to achieve a task, such as singing or moving a table together, by effecting coordinated change in their shared environment. In this work, we compare different prosthesis controllers (proportional electromyography with sequential switching, pattern recognition, and adaptive switching) in terms of how they present the hallmarks of joint action. The results of the comparison lead to a new perspective for understanding how existing myoelectric systems relate to each other, along with recommendations for how to improve these systems by increasing the collaborative communication between each partner.
Adaptive patch foraging in deep reinforcement learning agents
Oct 14, 2022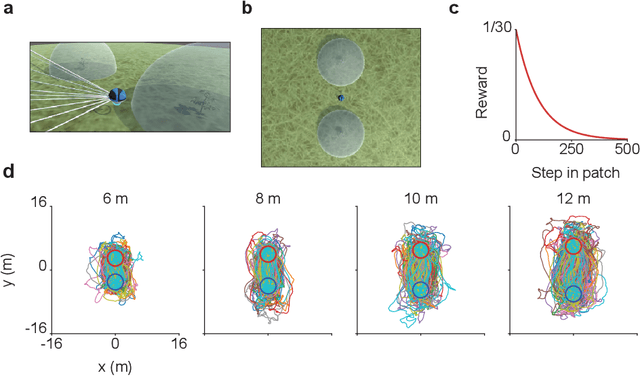

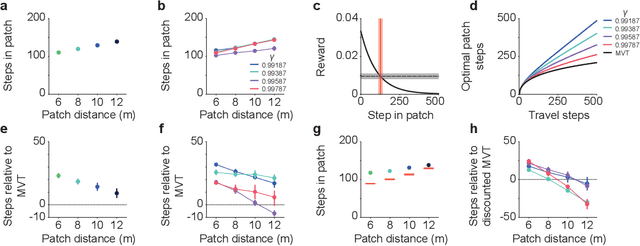
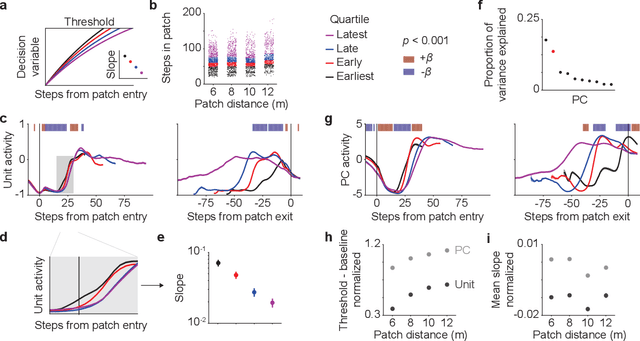
Patch foraging is one of the most heavily studied behavioral optimization challenges in biology. However, despite its importance to biological intelligence, this behavioral optimization problem is understudied in artificial intelligence research. Patch foraging is especially amenable to study given that it has a known optimal solution, which may be difficult to discover given current techniques in deep reinforcement learning. Here, we investigate deep reinforcement learning agents in an ecological patch foraging task. For the first time, we show that machine learning agents can learn to patch forage adaptively in patterns similar to biological foragers, and approach optimal patch foraging behavior when accounting for temporal discounting. Finally, we show emergent internal dynamics in these agents that resemble single-cell recordings from foraging non-human primates, which complements experimental and theoretical work on the neural mechanisms of biological foraging. This work suggests that agents interacting in complex environments with ecologically valid pressures arrive at common solutions, suggesting the emergence of foundational computations behind adaptive, intelligent behavior in both biological and artificial agents.