 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Cross-Sensor Feature Variations for Generalizable 3D Perception
Jun 10, 2026Radar-camera BEV perception often suffers from degraded performance when evaluated across datasets, as changes in driving scenes, sensor configurations, and environmental conditions can alter both the input observations and the internal fused representations. This work studies this issue from the perspective of source-domain variation modeling, aiming to improve the robustness of BEV-based 3D detectors without relying on target-domain samples. We introduce a framework that characterizes visual scene variations in the frequency domain and uses them to synthesize diverse source-domain views. By comparing the resulting fused BEV representations, the framework further captures how image-level variations influence multi-modal BEV features. These variation patterns are then used to regularize the detector, encouraging the learned fusion space to remain stable under latent scene changes. The proposed method is applied only during training and leaves the inference pipeline unchanged. Experiments on cross-dataset radar-camera 3D detection between View-of-Delft and TJ4DRadSet demonstrate consistent improvements over multiple BEV fusion backbones, and the gains remain effective when a small amount of target-domain data is available.
ITP-STDP: An Intrinsic-Timing Power-of-Two Learning Engine for On-Chip SNN Training
Jun 04, 2026Spiking neural networks (SNNs) have the potential to emerge as the third generation of neural networks and have attracted increasing attention across a wide range of applications. However, the large number of synaptic connections in SNNs leads to intensive weight-update computation by on-chip learning algorithms during training, resulting in substantial hardware resource utilization and energy consumption. Among existing SNN learning algorithms, spike-timing-dependent plasticity (STDP) is one of the most extensively studied and widely adopted, serving as a fundamental learning component in SNNs. To address the hardware and energy overheads associated with SNN training, this paper presents intrinsic-timing power-of-two STDP (ITP-STDP) and its corresponding prototype learning engine hardware architecture. The proposed design is evaluated through a dedicated mean-field synaptic drift model for dynamical analysis and further validated across SNN networks of different scales and datasets. It is further implemented on both ASIC and FPGA platforms and compared with state-of-the-art approaches, including the original STDP and more complex STDP variants. The results demonstrate superior energy efficiency, higher operating speed, and substantially lower hardware resource utilization, as the proposed design eliminates most of the computational overhead of STDP through both algorithmic and hardware-level optimizations. On the FPGA platform, the proposed design improves energy efficiency by 4.5$\times$ to 219.8$\times$ over the compared designs. On the ASIC platform, the proposed design achieves a 4.8$\times$ to 22.01$\times$ speedup while consuming only 1.2% to 3.3% of the area required by prior works.
MDS-Net: A Multi-scale Depth Stratification Based Monocular 3D Object Detection Algorithm
Jan 12, 2022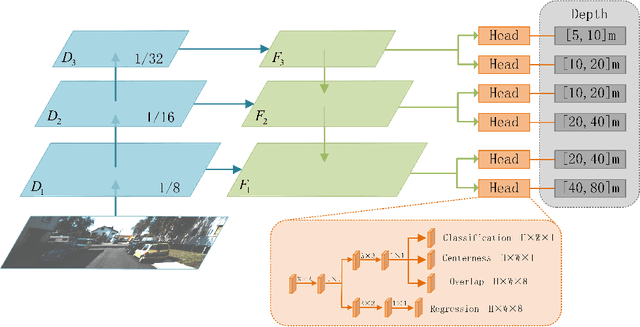
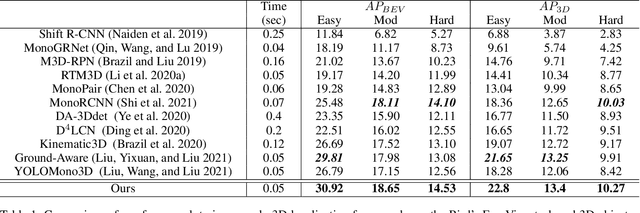

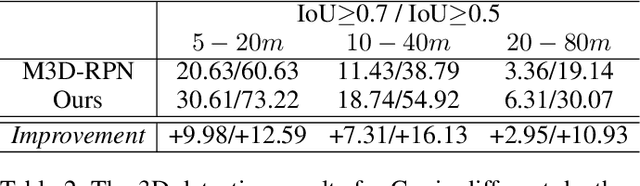
Monocular 3D object detection is very challenging in autonomous driving due to the lack of depth information. This paper proposes a one-stage monocular 3D object detection algorithm based on multi-scale depth stratification, which uses the anchor-free method to detect 3D objects in a per-pixel prediction. In the proposed MDS-Net, a novel depth-based stratification structure is developed to improve the network's ability of depth prediction by establishing mathematical models between depth and image size of objects. A new angle loss function is then developed to further improve the accuracy of the angle prediction and increase the convergence speed of training. An optimized soft-NMS is finally applied in the post-processing stage to adjust the confidence of candidate boxes. Experiments on the KITTI benchmark show that the MDS-Net outperforms the existing monocular 3D detection methods in 3D detection and BEV detection tasks while fulfilling real-time requirements.
Newtonalized Orthogonal Matching Pursuit for Linear Frequency Modulated Pulse Frequency Agile Radar
Jan 29, 2021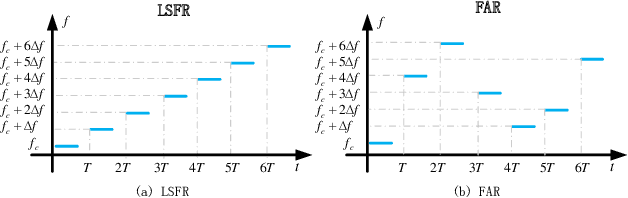


The linear frequency modulated (LFM) frequency agile radar (FAR) can synthesize a wide signal bandwidth through coherent processing while keeping the bandwidth of each pulse narrow. In this way, high range resolution profiles (HRRP) can be obtained without increasing the hardware system cost. Furthermore, the agility provides improved both robustness to jamming and spectrum efficiency. Motivated by the Newtonalized orthogonal matching pursuit (NOMP) for line spectral estimation problem, the NOMP for the FAR radar termed as NOMP-FAR is designed to process each coarse range bin to extract the HRRP and velocities of multiple targets, including the guide for determining the oversampling factor and the stopping criterion. In addition, it is shown that the target will cause false alarm in the nearby coarse range bins, a postprocessing algorithm is then proposed to suppress the ghost targets. Numerical simulations are conducted to demonstrate the effectiveness of NOMP-FAR.