 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMove-Then-Operate: Behavioral Phasing for Human-Like Robotic Manipulation
Apr 26, 2026We present Move-Then-Operate, a Vision language action framework that explicitly decouples robotic manipulation into two distinct behavioral phases: coarse relocation (move) and contact-critical interaction (operate). Unlike monolithic policies that conflate these heterogeneous regimes, our architecture employs a dual-expert policy routed by a learnable phase selector, introducing a structural inductive bias that isolates phase-specific dynamics. Phase labels are automatically generated via an MLLM-based pipeline conditioned on lightweight contextual cues such as end-effector velocity and subtask decomposition to ensure alignment with human motor patterns. Evaluated on the RoboTwin2 benchmark, our method achieves an average success rate of $68.9\%$, outperforming the monolithic $π_0$ baseline by $24\%$. It matches or exceeds models trained on $10\times$ more data and reaches peak performance in $40\%$ fewer training steps, demonstrating that architectural disentanglement of move and operate phases is a highly effective and efficient strategy for mastering high-precision manipulation.
Egocentric Instruction-oriented Affordance Prediction via Large Multimodal Model
Aug 25, 2025Affordance is crucial for intelligent robots in the context of object manipulation. In this paper, we argue that affordance should be task-/instruction-dependent, which is overlooked by many previous works. That is, different instructions can lead to different manipulation regions and directions even for the same object. According to this observation, we present a new dataset comprising fifteen thousand object-instruction-affordance triplets. All scenes in the dataset are from an egocentric viewpoint, designed to approximate the perspective of a human-like robot. Furthermore, we investigate how to enable large multimodal models (LMMs) to serve as affordance predictors by implementing a ``search against verifiers'' pipeline. An LMM is asked to progressively predict affordances, with the output at each step being verified by itself during the iterative process, imitating a reasoning process. Experiments show that our method not only unlocks new instruction-oriented affordance prediction capabilities, but also achieves outstanding performance broadly.
Stimulating Imagination: Towards General-purpose Object Rearrangement
Aug 03, 2024



General-purpose object placement is a fundamental capability of an intelligent generalist robot, i.e., being capable of rearranging objects following human instructions even in novel environments. To achieve this, we break the rearrangement down into three parts, including object localization, goal imagination and robot control, and propose a framework named SPORT. SPORT leverages pre-trained large vision models for broad semantic reasoning about objects, and learns a diffusion-based 3D pose estimator to ensure physically-realistic results. Only object types (to be moved or reference) are communicated between these two parts, which brings two benefits. One is that we can fully leverage the powerful ability of open-set object localization and recognition since no specific fine-tuning is needed for robotic scenarios. Furthermore, the diffusion-based estimator only need to "imagine" the poses of the moving and reference objects after the placement, while no necessity for their semantic information. Thus the training burden is greatly reduced and no massive training is required. The training data for goal pose estimation is collected in simulation and annotated with GPT-4. A set of simulation and real-world experiments demonstrate the potential of our approach to accomplish general-purpose object rearrangement, placing various objects following precise instructions.
Deep Attention Aware Feature Learning for Person Re-Identification
Mar 01, 2020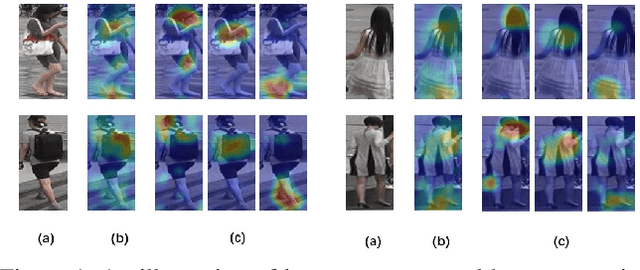
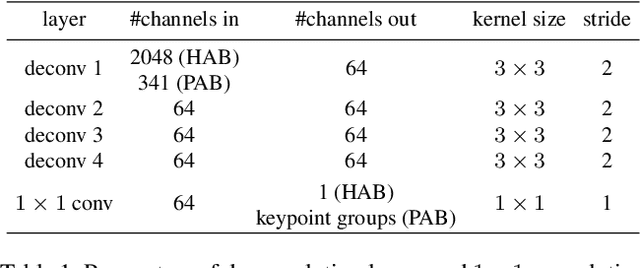
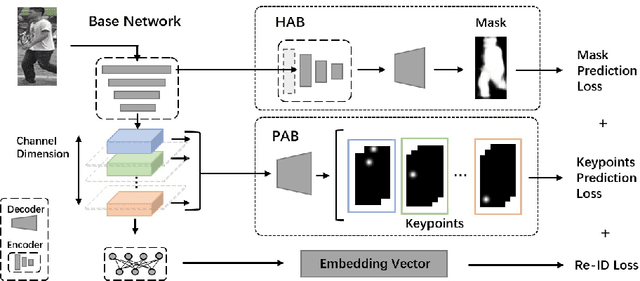
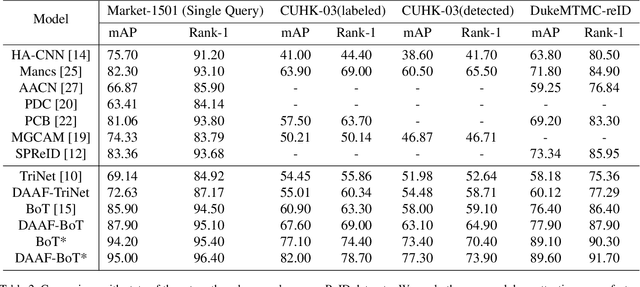
Visual attention has proven to be effective in improving the performance of person re-identification. Most existing methods apply visual attention heuristically by learning an additional attention map to re-weight the feature maps for person re-identification. However, this kind of methods inevitably increase the model complexity and inference time. In this paper, we propose to incorporate the attention learning as additional objectives in a person ReID network without changing the original structure, thus maintain the same inference time and model size. Two kinds of attentions have been considered to make the learned feature maps being aware of the person and related body parts respectively. Globally, a holistic attention branch (HAB) makes the feature maps obtained by backbone focus on persons so as to alleviate the influence of background. Locally, a partial attention branch (PAB) makes the extracted features be decoupled into several groups and be separately responsible for different body parts (i.e., keypoints), thus increasing the robustness to pose variation and partial occlusion. These two kinds of attentions are universal and can be incorporated into existing ReID networks. We have tested its performance on two typical networks (TriNet and Bag of Tricks) and observed significant performance improvement on five widely used datasets.