 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Risk-averse Bayesian Optimization for Controller Tuning
Jun 23, 2023Controller tuning and parameter optimization are crucial in system design to improve both the controller and underlying system performance. Bayesian optimization has been established as an efficient model-free method for controller tuning and adaptation. Standard methods, however, are not enough for high-precision systems to be robust with respect to unknown input-dependent noise and stable under safety constraints. In this work, we present a novel data-driven approach, RaGoOSE, for safe controller tuning in the presence of heteroscedastic noise, combining safe learning with risk-averse Bayesian optimization. We demonstrate the method for synthetic benchmark and compare its performance to established BO-based tuning methods. We further evaluate RaGoOSE performance on a real precision-motion system utilized in semiconductor industry applications and compare it to the built-in auto-tuning routine.
Meta-Learning Priors for Safe Bayesian Optimization
Oct 03, 2022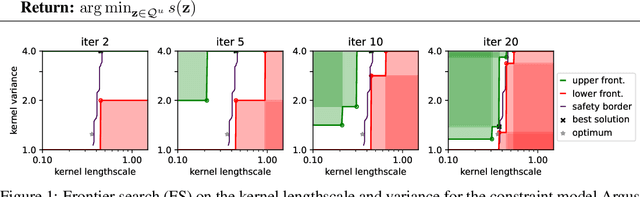
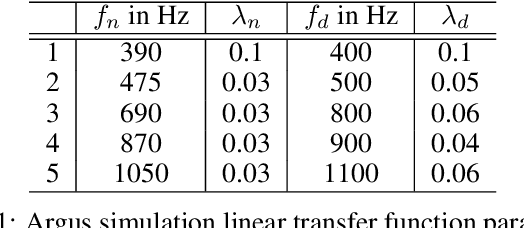
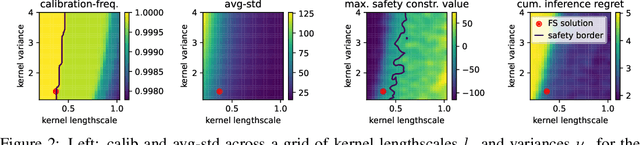

In robotics, optimizing controller parameters under safety constraints is an important challenge. Safe Bayesian optimization (BO) quantifies uncertainty in the objective and constraints to safely guide exploration in such settings. Hand-designing a suitable probabilistic model can be challenging, however. In the presence of unknown safety constraints, it is crucial to choose reliable model hyper-parameters to avoid safety violations. Here, we propose a data-driven approach to this problem by meta-learning priors for safe BO from offline data. We build on a meta-learning algorithm, F-PACOH, capable of providing reliable uncertainty quantification in settings of data scarcity. As core contribution, we develop a novel framework for choosing safety-compliant priors in a data-riven manner via empirical uncertainty metrics and a frontier search algorithm. On benchmark functions and a high-precision motion system, we demonstrate that our meta-learned priors accelerate the convergence of safe BO approaches while maintaining safety.