 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Domain-Specific Retrieval by NLI Fine-Tuning
Aug 06, 2023The aim of this article is to investigate the fine-tuning potential of natural language inference (NLI) data to improve information retrieval and ranking. We demonstrate this for both English and Polish languages, using data from one of the largest Polish e-commerce sites and selected open-domain datasets. We employ both monolingual and multilingual sentence encoders fine-tuned by a supervised method utilizing contrastive loss and NLI data. Our results point to the fact that NLI fine-tuning increases the performance of the models in both tasks and both languages, with the potential to improve mono- and multilingual models. Finally, we investigate uniformity and alignment of the embeddings to explain the effect of NLI-based fine-tuning for an out-of-domain use-case.
CARLA Real Traffic Scenarios -- novel training ground and benchmark for autonomous driving
Dec 16, 2020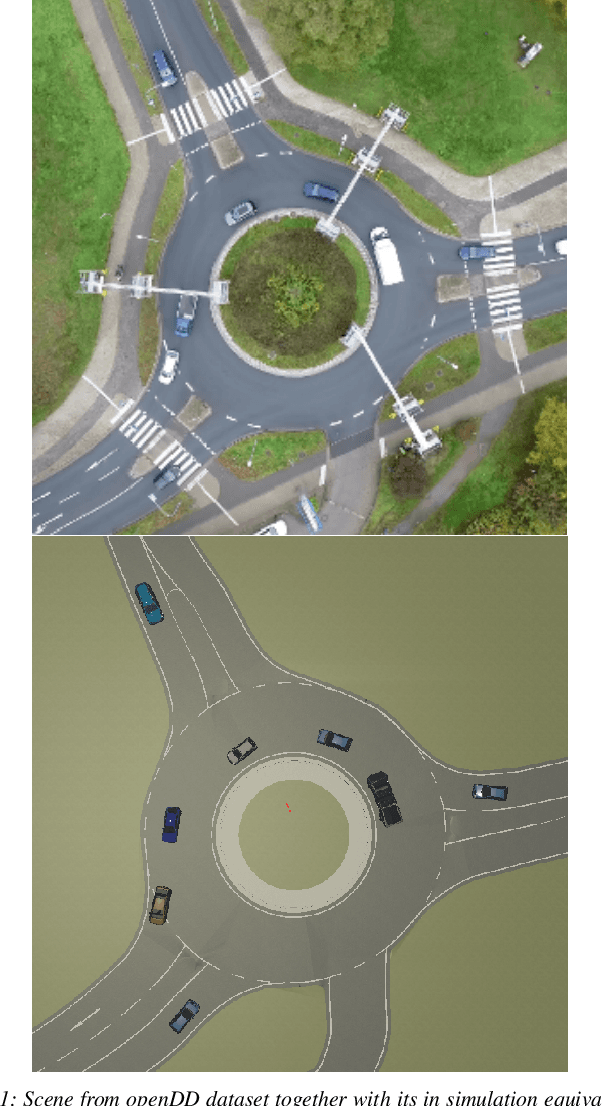
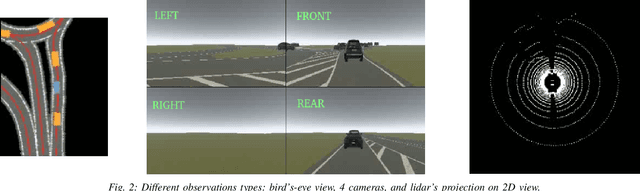
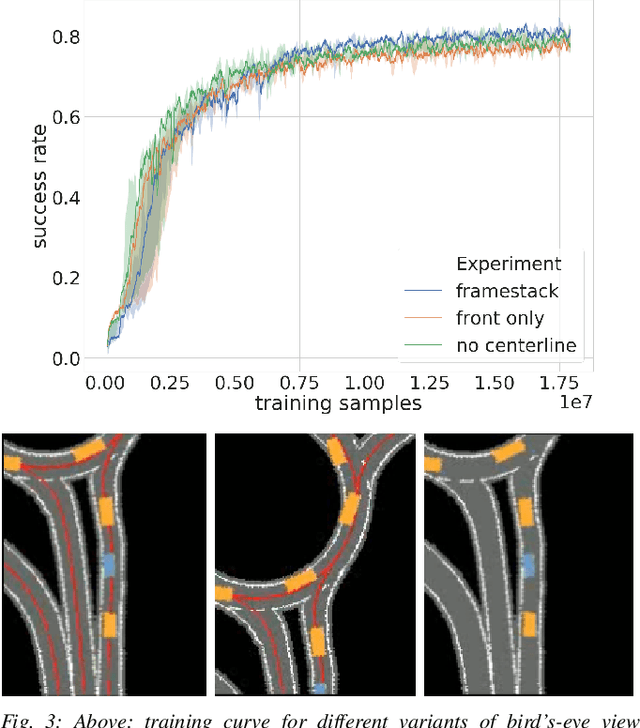
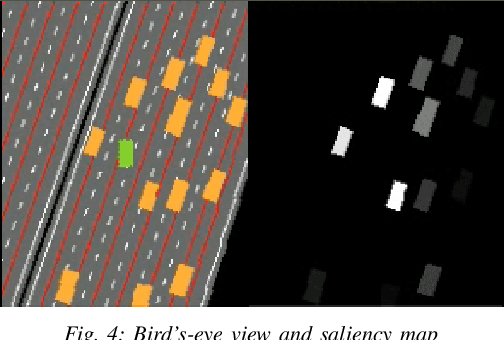
This work introduces interactive traffic scenarios in the CARLA simulator, which are based on real-world traffic. We concentrate on tactical tasks lasting several seconds, which are especially challenging for current control methods. The CARLA Real Traffic Scenarios (CRTS) is intended to be a training and testing ground for autonomous driving systems. To this end, we open-source the code under a permissive license and present a set of baseline policies. CRTS combines the realism of traffic scenarios and the flexibility of simulation. We use it to train agents using a reinforcement learning algorithm. We show how to obtain competitive polices and evaluate experimentally how observation types and reward schemes affect the training process and the resulting agent's behavior.
Simulation-based reinforcement learning for real-world autonomous driving
Dec 26, 2019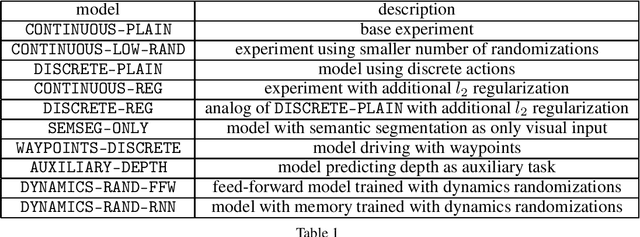
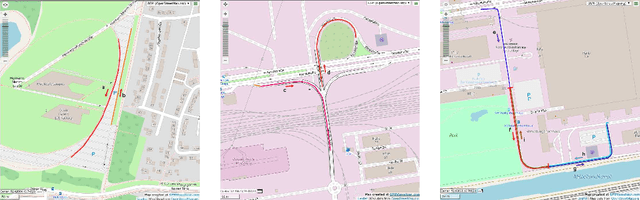
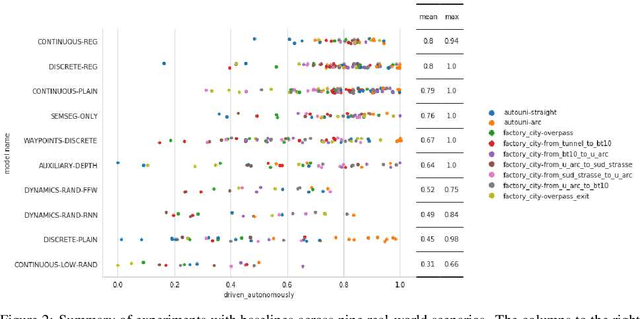
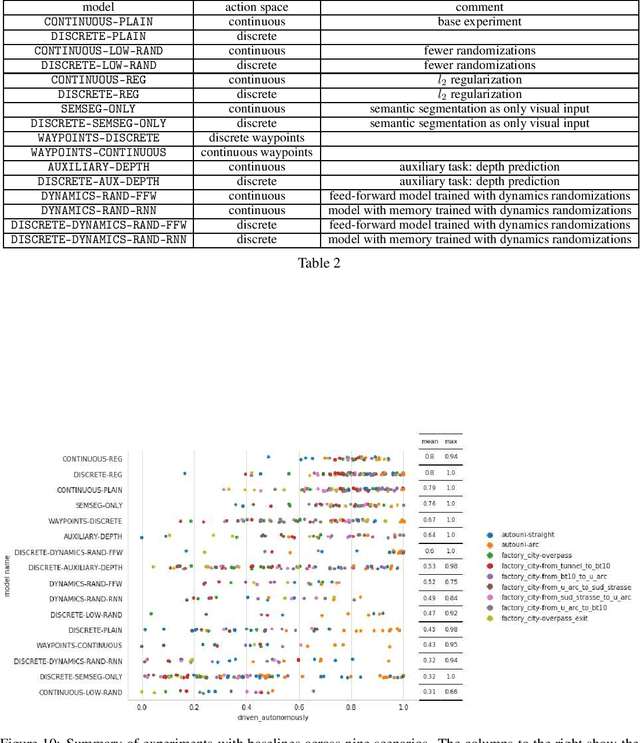
We use synthetic data and a reinforcement learning algorithm to train a system controlling a full-size real-world vehicle in a number of restricted driving scenarios. The driving policy uses RGB images as input. We analyze how design decisions about perception, control and training impact the real-world performance.