 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARLA Real Traffic Scenarios -- novel training ground and benchmark for autonomous driving
Dec 16, 2020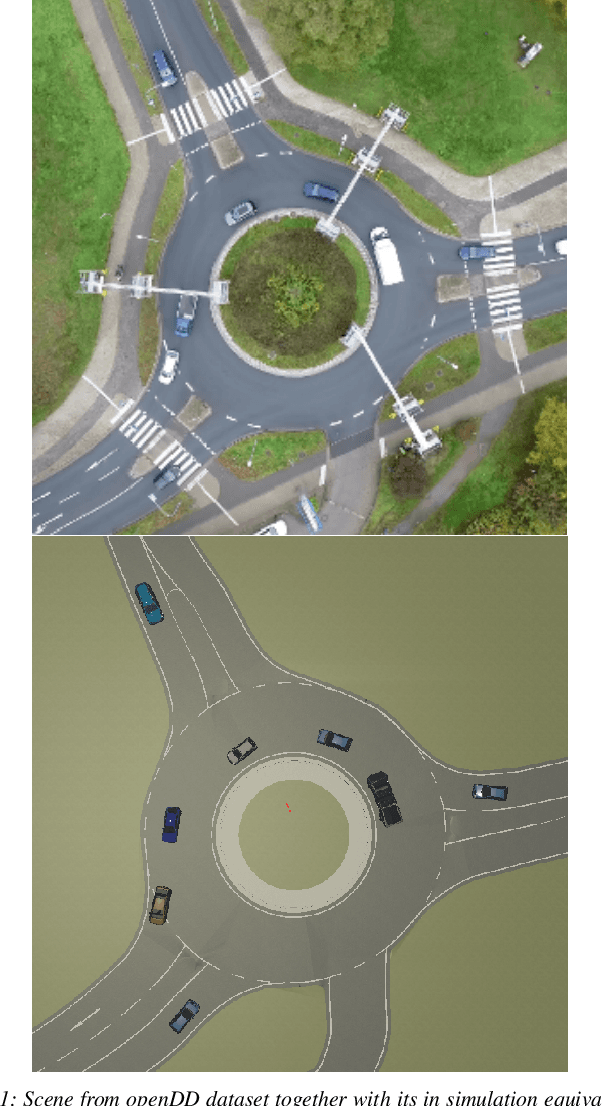
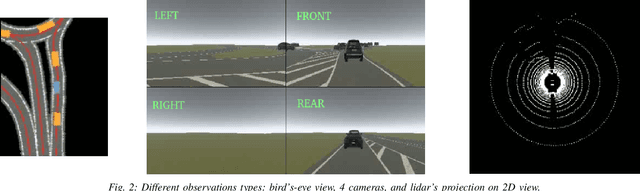
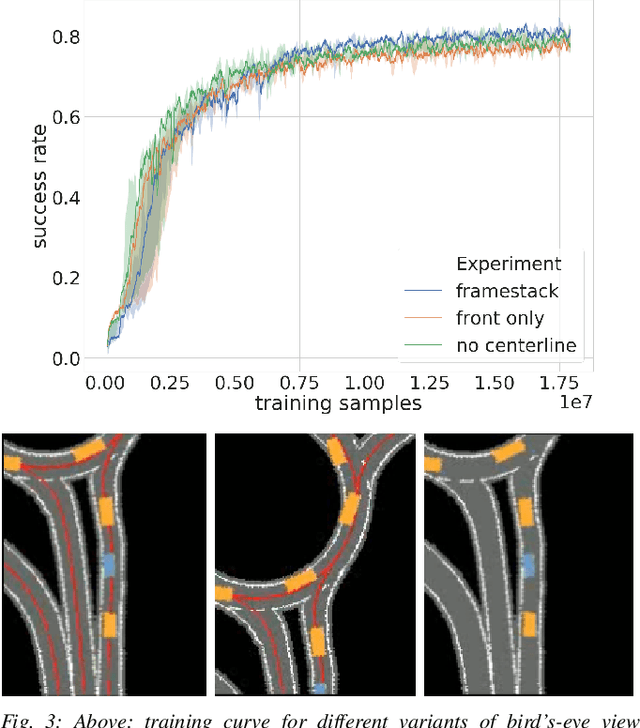
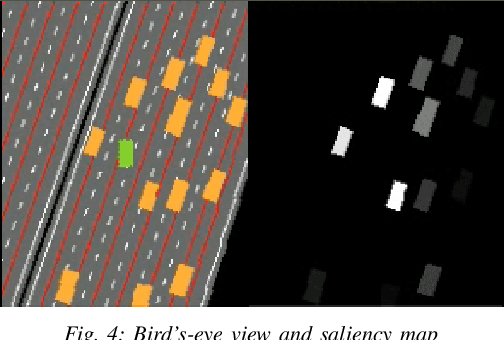
This work introduces interactive traffic scenarios in the CARLA simulator, which are based on real-world traffic. We concentrate on tactical tasks lasting several seconds, which are especially challenging for current control methods. The CARLA Real Traffic Scenarios (CRTS) is intended to be a training and testing ground for autonomous driving systems. To this end, we open-source the code under a permissive license and present a set of baseline policies. CRTS combines the realism of traffic scenarios and the flexibility of simulation. We use it to train agents using a reinforcement learning algorithm. We show how to obtain competitive polices and evaluate experimentally how observation types and reward schemes affect the training process and the resulting agent's behavior.
openDD: A Large-Scale Roundabout Drone Dataset
Jul 16, 2020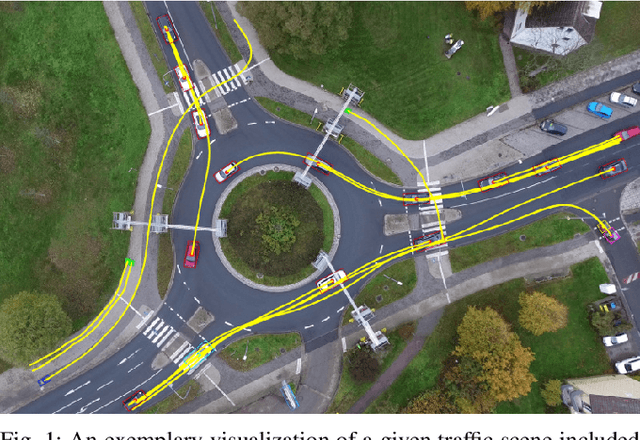
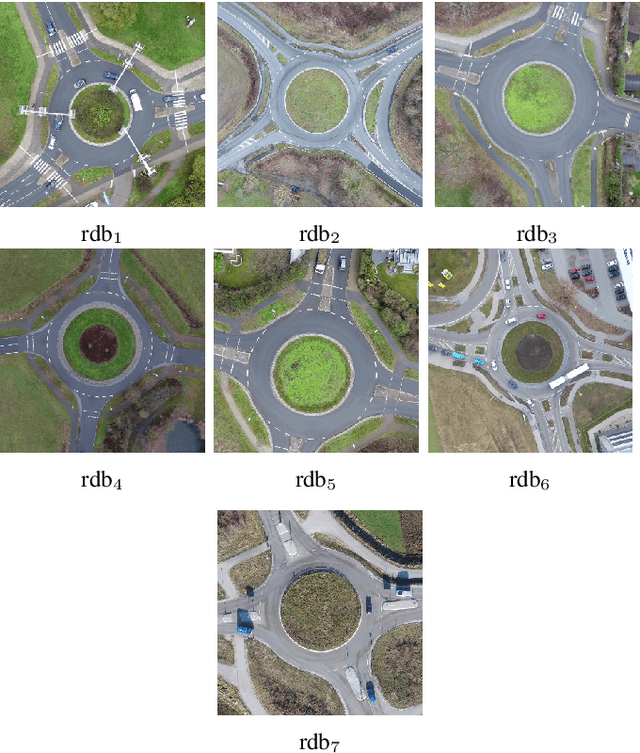
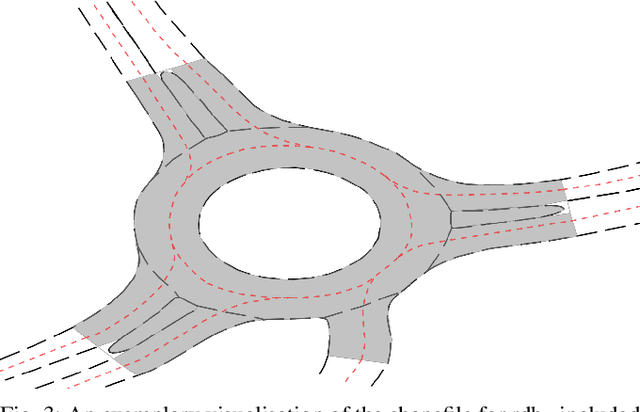
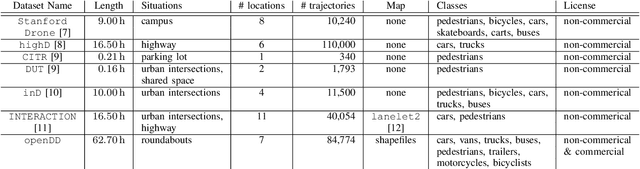
Analyzing and predicting the traffic scene around the ego vehicle has been one of the key challenges in autonomous driving. Datasets including the trajectories of all road users present in a scene, as well as the underlying road topology are invaluable to analyze the behavior of the different traffic participants. The interaction between the various traffic participants is especially high in intersection types that are not regulated by traffic lights, the most common one being the roundabout. We introduce the openDD dataset, including 84,774 accurately tracked trajectories and HD map data of seven different roundabouts. The openDD dataset is annotated using images taken by a drone in 501 separate flights, totalling in over 62 hours of trajectory data. As of today, openDD is by far the largest publicly available trajectory dataset recorded from a drone perspective, while comparable datasets span 17 hours at most. The data is available, for both commercial and noncommercial use, at: http://www.l3pilot.eu/openDD.