Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based reinforcement learning for real-world autonomous driving
Paper and Code
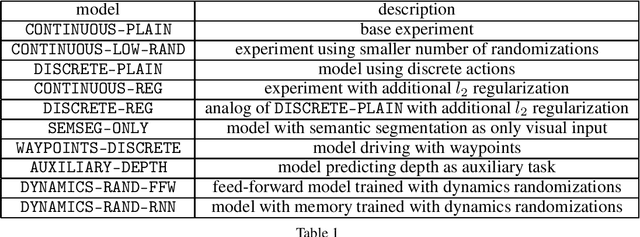
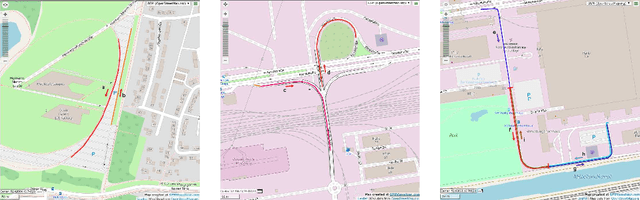
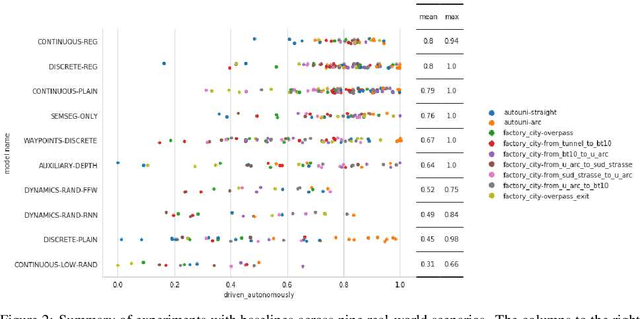
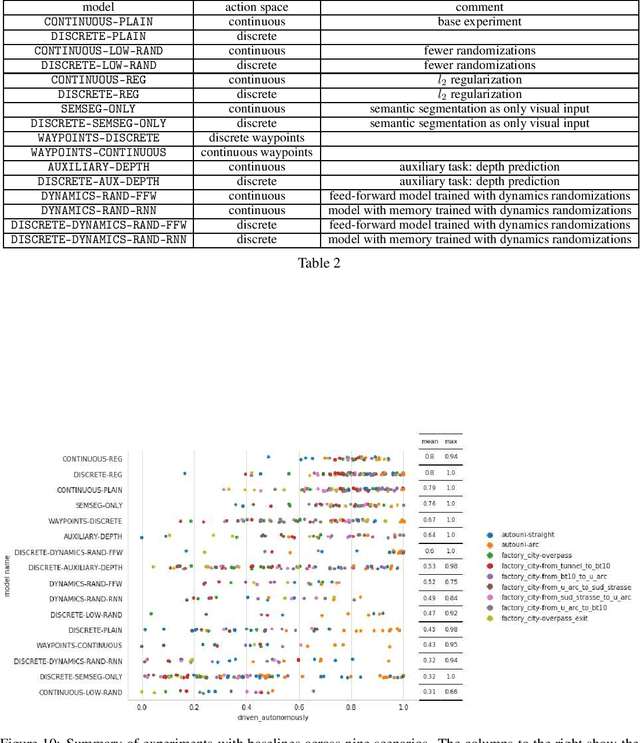
We use synthetic data and a reinforcement learning algorithm to train a system controlling a full-size real-world vehicle in a number of restricted driving scenarios. The driving policy uses RGB images as input. We analyze how design decisions about perception, control and training impact the real-world performance.
View paper on