 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Surgical Liver Phantom for Cholecystectomy Training
Sep 05, 2024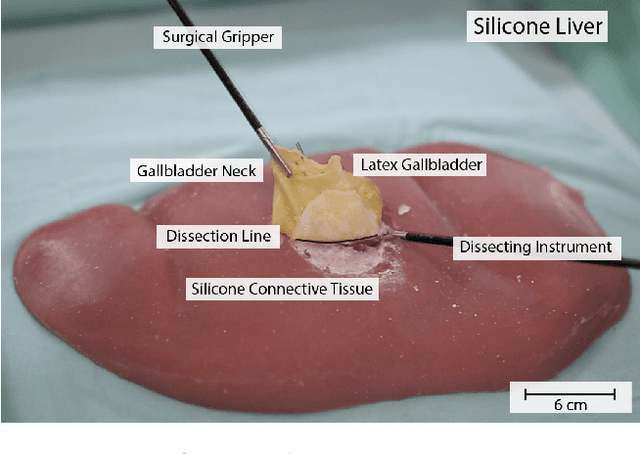
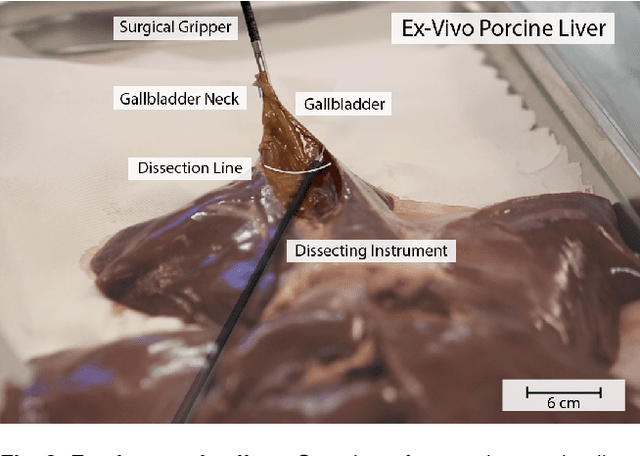
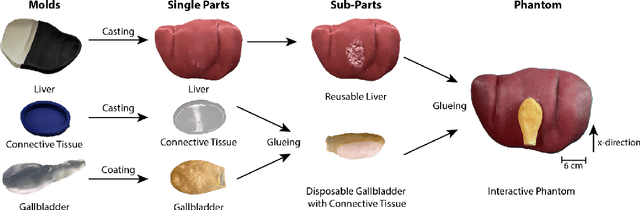
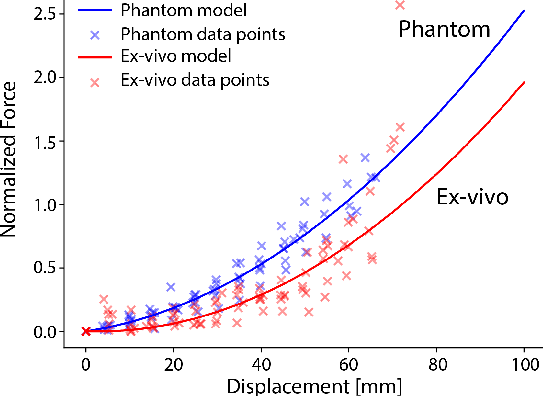
Training and prototype development in robot-assisted surgery requires appropriate and safe environments for the execution of surgical procedures. Current dry lab laparoscopy phantoms often lack the ability to mimic complex, interactive surgical tasks. This work presents an interactive surgical phantom for the cholecystectomy. The phantom enables the removal of the gallbladder during cholecystectomy by allowing manipulations and cutting interactions with the synthetic tissue. The force-displacement behavior of the gallbladder is modelled based on retraction demonstrations. The force model is compared to the force model of ex-vivo porcine gallbladders and evaluated on its ability to estimate retraction forces.
LapSeg3D: Weakly Supervised Semantic Segmentation of Point Clouds Representing Laparoscopic Scenes
Jul 15, 2022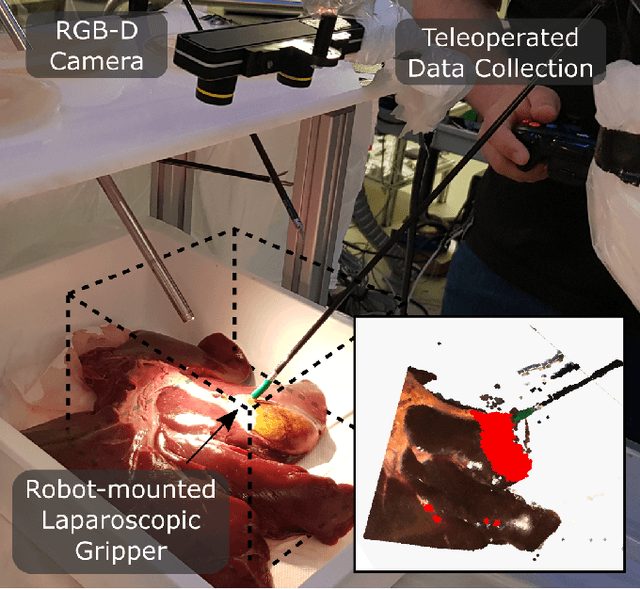
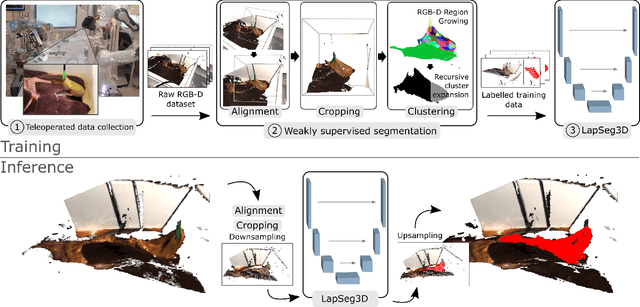
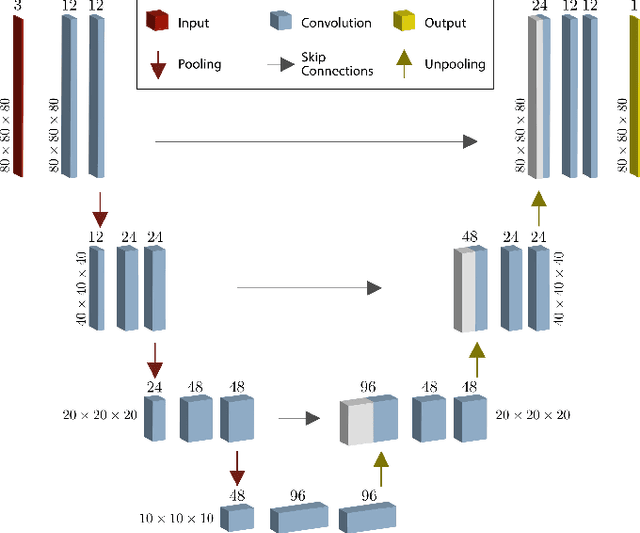
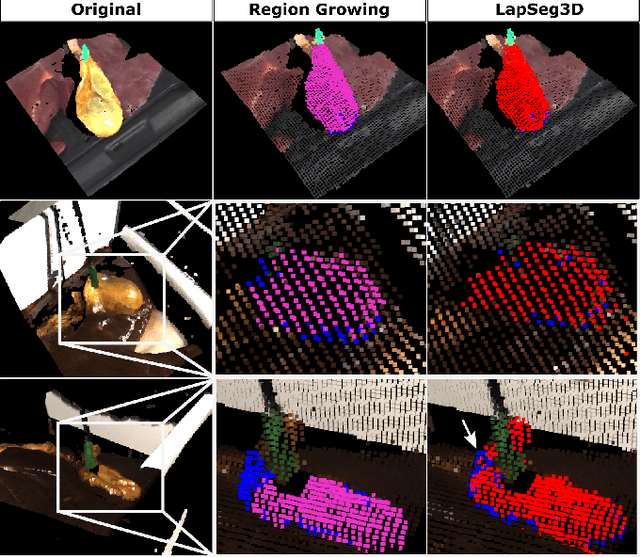
The semantic segmentation of surgical scenes is a prerequisite for task automation in robot assisted interventions. We propose LapSeg3D, a novel DNN-based approach for the voxel-wise annotation of point clouds representing surgical scenes. As the manual annotation of training data is highly time consuming, we introduce a semi-autonomous clustering-based pipeline for the annotation of the gallbladder, which is used to generate segmented labels for the DNN. When evaluated against manually annotated data, LapSeg3D achieves an F1 score of 0.94 for gallbladder segmentation on various datasets of ex-vivo porcine livers. We show LapSeg3D to generalize accurately across different gallbladders and datasets recorded with different RGB-D camera systems.