 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Single-Objective Sub-Graph-Based Mutation for Solving the Bi-Objective Minimum Spanning Tree Problem
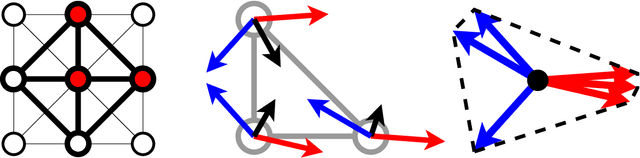
May 31, 2023We contribute to the efficient approximation of the Pareto-set for the classical $\mathcal{NP}$-hard multi-objective minimum spanning tree problem (moMST) adopting evolutionary computation. More precisely, by building upon preliminary work, we analyse the neighborhood structure of Pareto-optimal spanning trees and design several highly biased sub-graph-based mutation operators founded on the gained insights. In a nutshell, these operators replace (un)connected sub-trees of candidate solutions with locally optimal sub-trees. The latter (biased) step is realized by applying Kruskal's single-objective MST algorithm to a weighted sum scalarization of a sub-graph. We prove runtime complexity results for the introduced operators and investigate the desirable Pareto-beneficial property. This property states that mutants cannot be dominated by their parent. Moreover, we perform an extensive experimental benchmark study to showcase the operator's practical suitability. Our results confirm that the sub-graph based operators beat baseline algorithms from the literature even with severely restricted computational budget in terms of function evaluations on four different classes of complete graphs with different shapes of the Pareto-front.
MOLE: Digging Tunnels Through Multimodal Multi-Objective Landscapes
Apr 22, 2022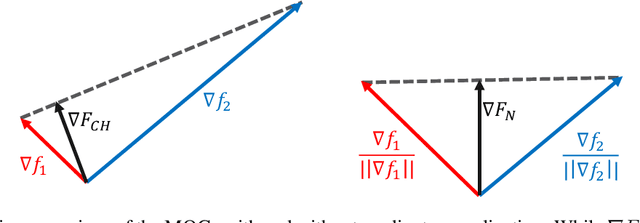
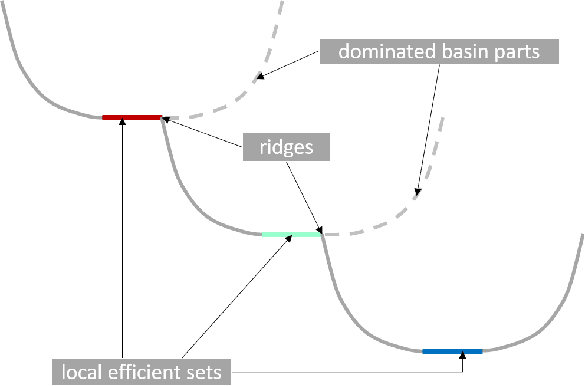
Recent advances in the visualization of continuous multimodal multi-objective optimization (MMMOO) landscapes brought a new perspective to their search dynamics. Locally efficient (LE) sets, often considered as traps for local search, are rarely isolated in the decision space. Rather, intersections by superposing attraction basins lead to further solution sets that at least partially contain better solutions. The Multi-Objective Gradient Sliding Algorithm (MOGSA) is an algorithmic concept developed to exploit these superpositions. While it has promising performance on many MMMOO problems with linear LE sets, closer analysis of MOGSA revealed that it does not sufficiently generalize to a wider set of test problems. Based on a detailed analysis of shortcomings of MOGSA, we propose a new algorithm, the Multi-Objective Landscape Explorer (MOLE). It is able to efficiently model and exploit LE sets in MMMOO problems. An implementation of MOLE is presented for the bi-objective case, and the practicality of the approach is shown in a benchmarking experiment on the Bi-Objective BBOB testbed.
To Boldly Show What No One Has Seen Before: A Dashboard for Visualizing Multi-objective Landscapes
Nov 29, 2020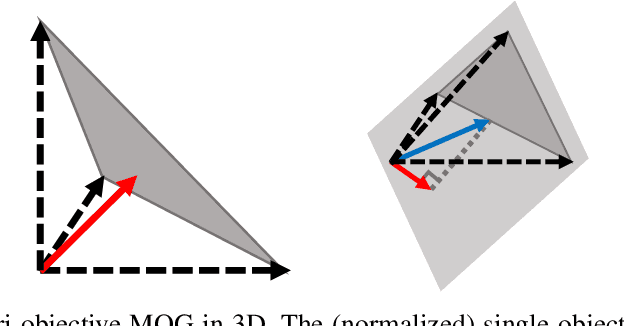
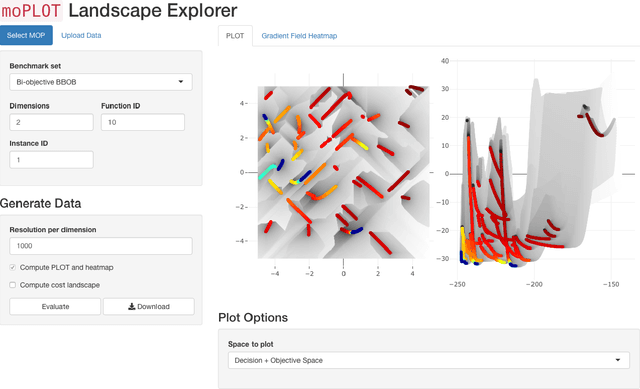
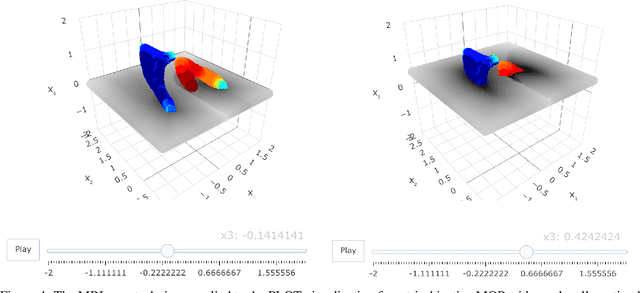
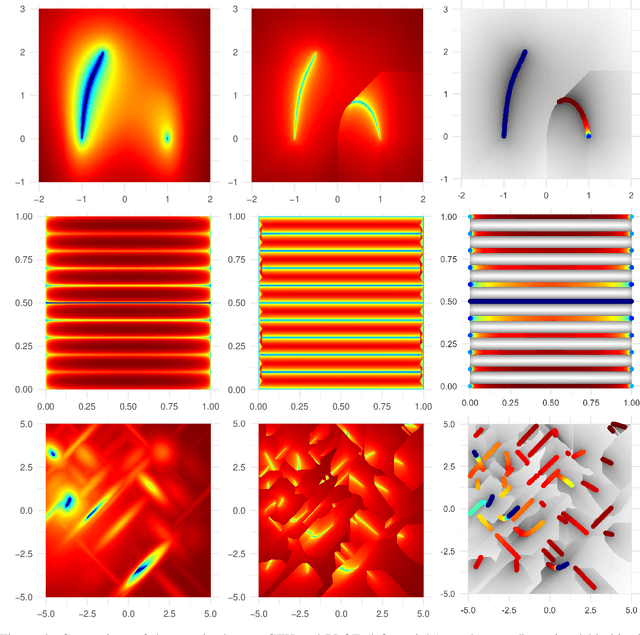
Simultaneously visualizing the decision and objective space of continuous multi-objective optimization problems (MOPs) recently provided key contributions in understanding the structure of their landscapes. For the sake of advancing these recent findings, we compiled all state-of-the-art visualization methods in a single R-package (moPLOT). Moreover, we extended these techniques to handle three-dimensional decision spaces and propose two solutions for visualizing the resulting volume of data points. This enables - for the first time - to illustrate the landscape structures of three-dimensional MOPs. However, creating these visualizations using the aforementioned framework still lays behind a high barrier of entry for many people as it requires basic skills in R. To enable any user to create and explore MOP landscapes using moPLOT, we additionally provide a dashboard that allows to compute the state-of-the-art visualizations for a wide variety of common benchmark functions through an interactive (web-based) user interface.
Multiobjectivization of Local Search: Single-Objective Optimization Benefits From Multi-Objective Gradient Descent
Oct 02, 2020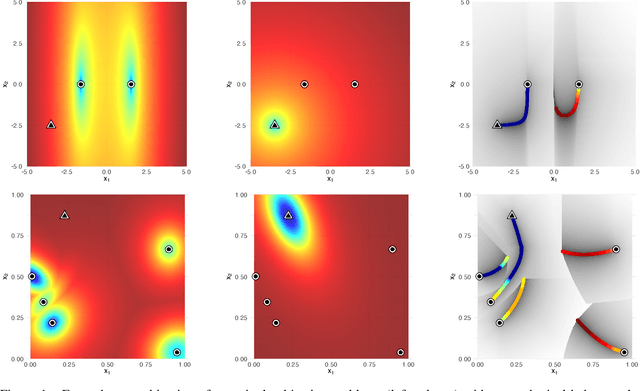


Multimodality is one of the biggest difficulties for optimization as local optima are often preventing algorithms from making progress. This does not only challenge local strategies that can get stuck. It also hinders meta-heuristics like evolutionary algorithms in convergence to the global optimum. In this paper we present a new concept of gradient descent, which is able to escape local traps. It relies on multiobjectivization of the original problem and applies the recently proposed and here slightly modified multi-objective local search mechanism MOGSA. We use a sophisticated visualization technique for multi-objective problems to prove the working principle of our idea. As such, this work highlights the transfer of new insights from the multi-objective to the single-objective domain and provides first visual evidence that multiobjectivization can link single-objective local optima in multimodal landscapes.
Empirical Study on the Benefits of Multiobjectivization for Solving Single-Objective Problems
Jun 25, 2020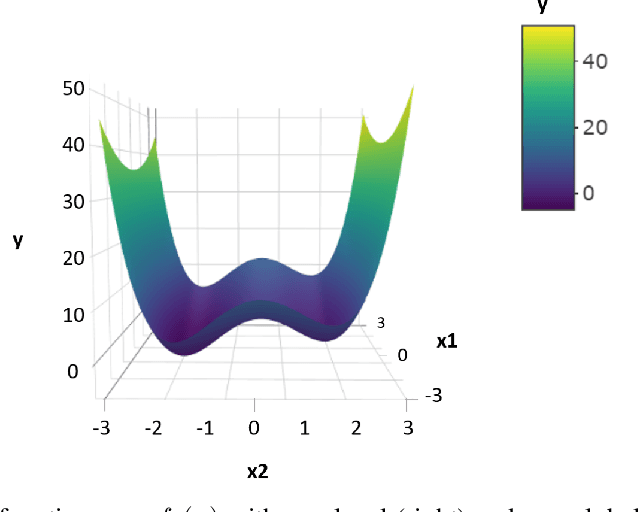



When dealing with continuous single-objective problems, multimodality poses one of the biggest difficulties for global optimization. Local optima are often preventing algorithms from making progress and thus pose a severe threat. In this paper we analyze how single-objective optimization can benefit from multiobjectivization by considering an additional objective. With the use of a sophisticated visualization technique based on the multi-objective gradients, the properties of the arising multi-objective landscapes are illustrated and examined. We will empirically show that the multi-objective optimizer MOGSA is able to exploit these properties to overcome local traps. The performance of MOGSA is assessed on a testbed of several functions provided by the COCO platform. The results are compared to the local optimizer Nelder-Mead.
One PLOT to Show Them All: Visualization of Efficient Sets in Multi-Objective Landscapes
Jun 20, 2020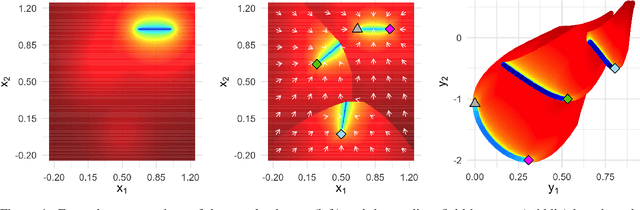
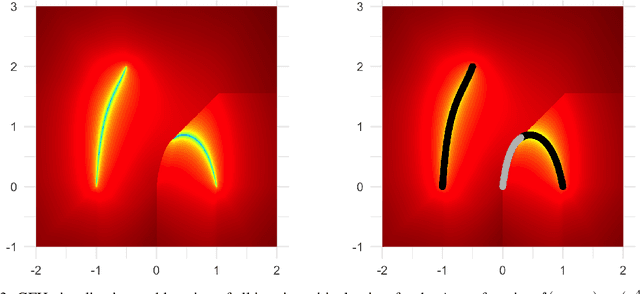
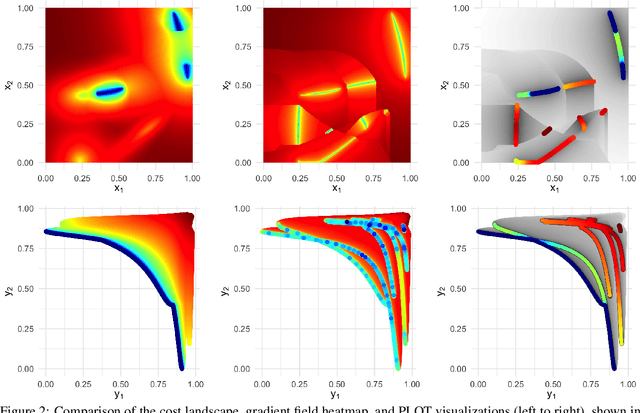
Visualization techniques for the decision space of continuous multi-objective optimization problems (MOPs) are rather scarce in research. For long, all techniques focused on global optimality and even for the few available landscape visualizations, e.g., cost landscapes, globality is the main criterion. In contrast, the recently proposed gradient field heatmaps (GFHs) emphasize the location and attraction basins of local efficient sets, but ignore the relation of sets in terms of solution quality. In this paper, we propose a new and hybrid visualization technique, which combines the advantages of both approaches in order to represent local and global optimality together within a single visualization. Therefore, we build on the GFH approach but apply a new technique for approximating the location of locally efficient points and using the divergence of the multi-objective gradient vector field as a robust second-order condition. Then, the relative dominance relationship of the determined locally efficient points is used to visualize the complete landscape of the MOP. Augmented by information on the basins of attraction, this Plot of Landscapes with Optimal Trade-offs (PLOT) becomes one of the most informative multi-objective landscape visualization techniques available.
Dynamic Bi-Objective Routing of Multiple Vehicles
May 28, 2020

In practice, e.g. in delivery and service scenarios, Vehicle-Routing-Problems (VRPs) often imply repeated decision making on dynamic customer requests. As in classical VRPs, tours have to be planned short while the number of serviced customers has to be maximized at the same time resulting in a multi-objective problem. Beyond that, however, dynamic requests lead to the need for re-planning of not yet realized tour parts, while already realized tour parts are irreversible. In this paper we study this type of bi-objective dynamic VRP including sequential decision making and concurrent realization of decisions. We adopt a recently proposed Dynamic Evolutionary Multi-Objective Algorithm (DEMOA) for a related VRP problem and extend it to the more realistic (here considered) scenario of multiple vehicles. We empirically show that our DEMOA is competitive with a multi-vehicle offline and clairvoyant variant of the proposed DEMOA as well as with the dynamic single-vehicle approach proposed earlier.
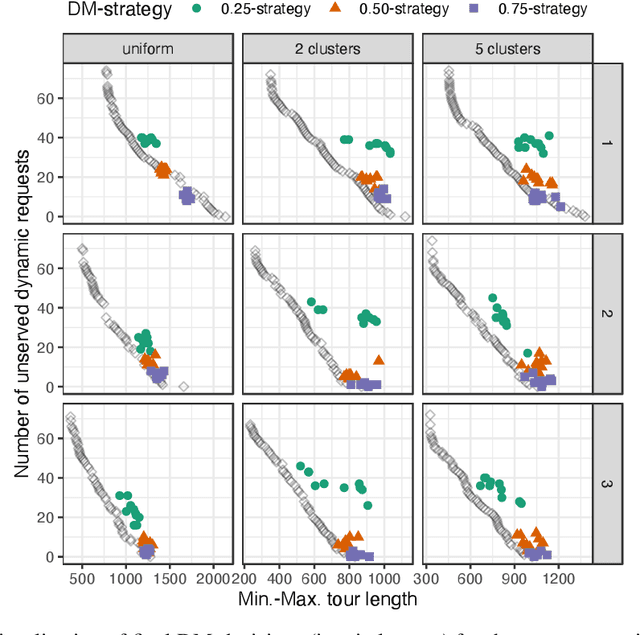
Towards Decision Support in Dynamic Bi-Objective Vehicle Routing
May 28, 2020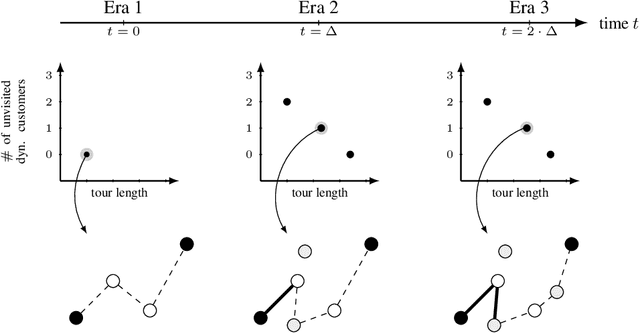

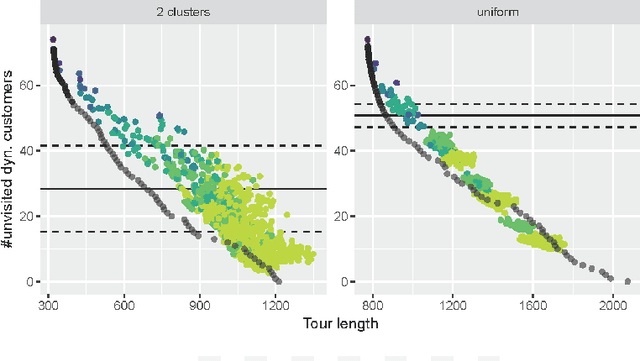
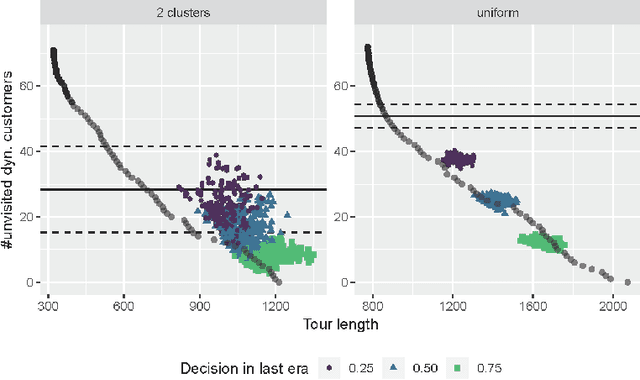
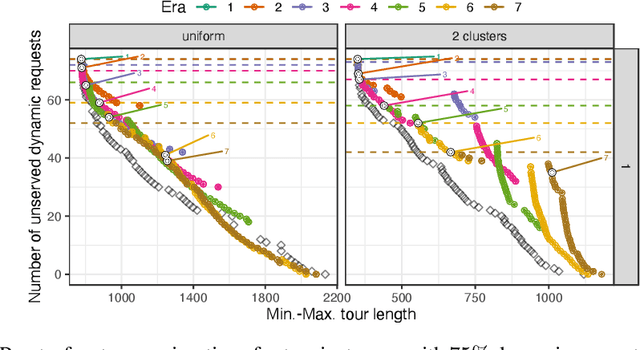
We consider a dynamic bi-objective vehicle routing problem, where a subset of customers ask for service over time. Therein, the distance traveled by a single vehicle and the number of unserved dynamic requests is minimized by a dynamic evolutionary multi-objective algorithm (DEMOA), which operates on discrete time windows (eras). A decision is made at each era by a decision-maker, thus any decision depends on irreversible decisions made in foregoing eras. To understand effects of sequences of decision-making and interactions/dependencies between decisions made, we conduct a series of experiments. More precisely, we fix a set of decision-maker preferences $D$ and the number of eras $n_t$ and analyze all $|D|^{n_t}$ combinations of decision-maker options. We find that for random uniform instances (a) the final selected solutions mainly depend on the final decision and not on the decision history, (b) solutions are quite robust with respect to the number of unvisited dynamic customers, and (c) solutions of the dynamic approach can even dominate solutions obtained by a clairvoyant EMOA. In contrast, for instances with clustered customers, we observe a strong dependency on decision-making history as well as more variance in solution diversity.
Openbots
Feb 19, 2019



Social bots have recently gained attention in the context of public opinion manipulation on social media platforms. While a lot of research effort has been put into the classification and detection of such (semi-)automated programs, it is still unclear how sophisticated those bots actually are, which platforms they target, and where they originate from. To answer these questions, we gathered repository data from open source collaboration platforms to identify the status-quo as well as trends of publicly available bot code. Our findings indicate that most of the code on collaboration platforms is of supportive nature and provides modules of automation instead of fully fledged social bot programs. Hence, the cost (in terms of additional programming effort) for building social bots with the goal of topic-specific manipulation is higher than assumed and that methods in context of machine- or deep-learning currently only play a minor role. However, our approach can be applied as multifaceted knowledge discovery framework to monitor trends in public bot code evolution to detect new developments and streams.
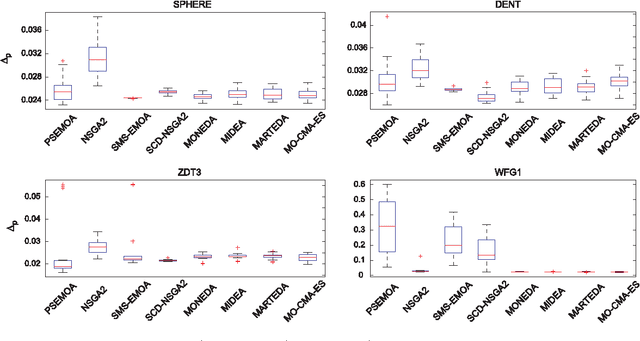
Averaged Hausdorff Approximations of Pareto Fronts based on Multiobjective Estimation of Distribution Algorithms
Mar 26, 2015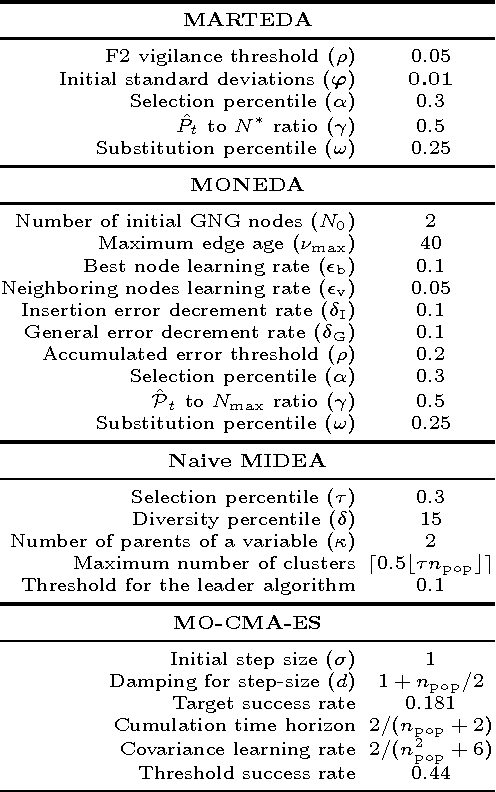


In the a posteriori approach of multiobjective optimization the Pareto front is approximated by a finite set of solutions in the objective space. The quality of the approximation can be measured by different indicators that take into account the approximation's closeness to the Pareto front and its distribution along the Pareto front. In particular, the averaged Hausdorff indicator prefers an almost uniform distribution. An observed drawback of multiobjective estimation of distribution algorithms (MEDAs) is that - as common for randomized metaheuristics - the final population usually is not uniformly distributed along the Pareto front. Therefore, we propose a postprocessing strategy which consists of applying the averaged Hausdorff indicator to the complete archive of generated solutions after optimization in order to select a uniformly distributed subset of nondominated solutions from the archive. In this paper, we put forward a strategy for extracting the above described subset. The effectiveness of the proposal is contrasted in a series of experiments that involve different MEDAs and filtering techniques.