 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpolation-Based Optimization for Enforcing lp-Norm Metric Differential Privacy in Continuous and Fine-Grained Domains
Jan 15, 2026Metric Differential Privacy (mDP) generalizes Local Differential Privacy (LDP) by adapting privacy guarantees based on pairwise distances, enabling context-aware protection and improved utility. While existing optimization-based methods reduce utility loss effectively in coarse-grained domains, optimizing mDP in fine-grained or continuous settings remains challenging due to the computational cost of constructing dense perterubation matrices and satisfying pointwise constraints. In this paper, we propose an interpolation-based framework for optimizing lp-norm mDP in such domains. Our approach optimizes perturbation distributions at a sparse set of anchor points and interpolates distributions at non-anchor locations via log-convex combinations, which provably preserve mDP. To address privacy violations caused by naive interpolation in high-dimensional spaces, we decompose the interpolation process into a sequence of one-dimensional steps and derive a corrected formulation that enforces lp-norm mDP by design. We further explore joint optimization over perturbation distributions and privacy budget allocation across dimensions. Experiments on real-world location datasets demonstrate that our method offers rigorous privacy guarantees and competitive utility in fine-grained domains, outperforming baseline mechanisms. in high-dimensional spaces, we decompose the interpolation process into a sequence of one-dimensional steps and derive a corrected formulation that enforces lp-norm mDP by design. We further explore joint optimization over perturbation distributions and privacy budget allocation across dimensions. Experiments on real-world location datasets demonstrate that our method offers rigorous privacy guarantees and competitive utility in fine-grained domains, outperforming baseline mechanisms.
FlowDistill: Scalable Traffic Flow Prediction via Distillation from LLMs
Apr 02, 2025Accurate traffic flow prediction is vital for optimizing urban mobility, yet it remains difficult in many cities due to complex spatio-temporal dependencies and limited high-quality data. While deep graph-based models demonstrate strong predictive power, their performance often comes at the cost of high computational overhead and substantial training data requirements, making them impractical for deployment in resource-constrained or data-scarce environments. We propose the FlowDistill, a lightweight and scalable traffic prediction framework based on knowledge distillation from large language models (LLMs). In this teacher-student setup, a fine-tuned LLM guides a compact multi-layer perceptron (MLP) student model using a novel combination of the information bottleneck principle and teacher-bounded regression loss, ensuring the distilled model retains only essential and transferable knowledge. Spatial and temporal correlations are explicitly encoded to enhance the model's generalization across diverse urban settings. Despite its simplicity, FlowDistill consistently outperforms state-of-the-art models in prediction accuracy while requiring significantly less training data, and achieving lower memory usage and inference latency, highlighting its efficiency and suitability for real-world, scalable deployment.
Harnessing LLMs for Cross-City OD Flow Prediction
Sep 05, 2024



Understanding and predicting Origin-Destination (OD) flows is crucial for urban planning and transportation management. Traditional OD prediction models, while effective within single cities, often face limitations when applied across different cities due to varied traffic conditions, urban layouts, and socio-economic factors. In this paper, by employing Large Language Models (LLMs), we introduce a new method for cross-city OD flow prediction. Our approach leverages the advanced semantic understanding and contextual learning capabilities of LLMs to bridge the gap between cities with different characteristics, providing a robust and adaptable solution for accurate OD flow prediction that can be transferred from one city to another. Our novel framework involves four major components: collecting OD training datasets from a source city, instruction-tuning the LLMs, predicting destination POIs in a target city, and identifying the locations that best match the predicted destination POIs. We introduce a new loss function that integrates POI semantics and trip distance during training. By extracting high-quality semantic features from human mobility and POI data, the model understands spatial and functional relationships within urban spaces and captures interactions between individuals and various POIs. Extensive experimental results demonstrate the superiority of our approach over the state-of-the-art learning-based methods in cross-city OD flow prediction.
Enhancing Scalability of Metric Differential Privacy via Secret Dataset Partitioning and Benders Decomposition
May 07, 2024Metric Differential Privacy (mDP) extends the concept of Differential Privacy (DP) to serve as a new paradigm of data perturbation. It is designed to protect secret data represented in general metric space, such as text data encoded as word embeddings or geo-location data on the road network or grid maps. To derive an optimal data perturbation mechanism under mDP, a widely used method is linear programming (LP), which, however, might suffer from a polynomial explosion of decision variables, rendering it impractical in large-scale mDP. In this paper, our objective is to develop a new computation framework to enhance the scalability of the LP-based mDP. Considering the connections established by the mDP constraints among the secret records, we partition the original secret dataset into various subsets. Building upon the partition, we reformulate the LP problem for mDP and solve it via Benders Decomposition, which is composed of two stages: (1) a master program to manage the perturbation calculation across subsets and (2) a set of subproblems, each managing the perturbation derivation within a subset. Our experimental results on multiple datasets, including geo-location data in the road network/grid maps, text data, and synthetic data, underscore our proposed mechanism's superior scalability and efficiency.
Adaptive and Cascaded Compressive Sensing
Mar 21, 2022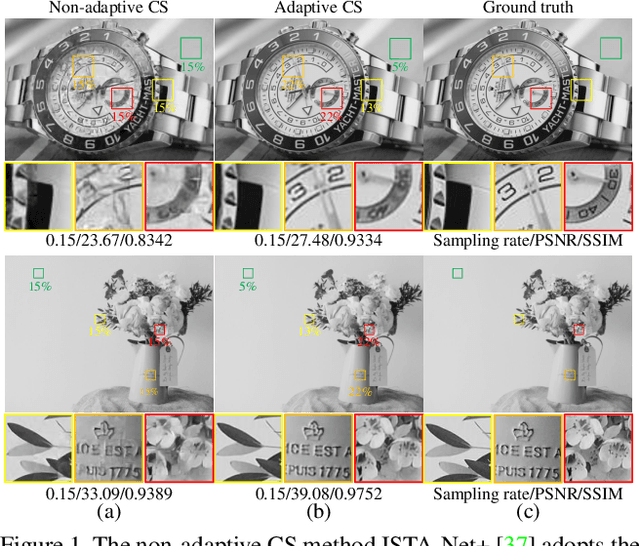
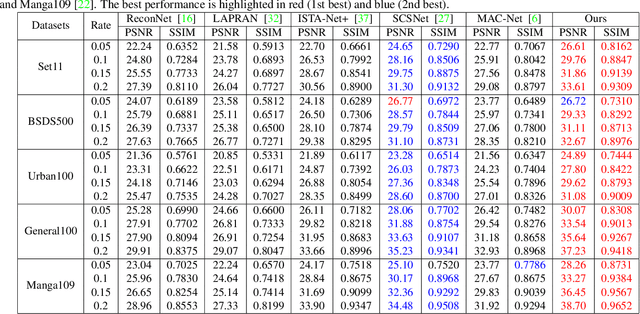
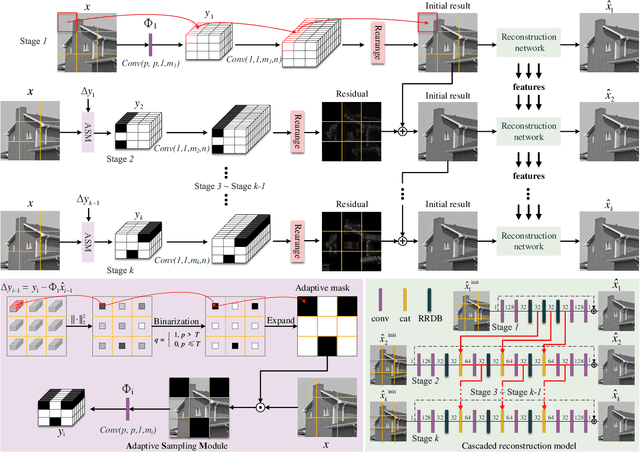
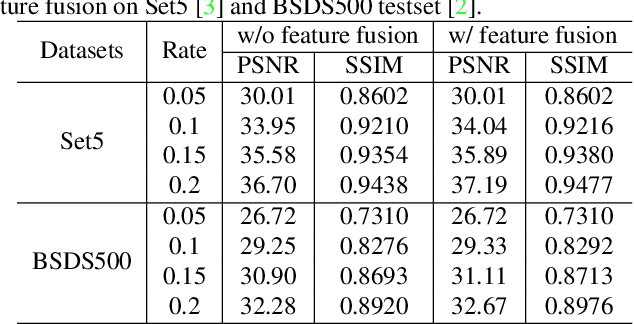
Scene-dependent adaptive compressive sensing (CS) has been a long pursuing goal which has huge potential in significantly improving the performance of CS. However, without accessing to the ground truth image, how to design the scene-dependent adaptive strategy is still an open-problem and the improvement in sampling efficiency is still quite limited. In this paper, a restricted isometry property (RIP) condition based error clamping is proposed, which could directly predict the reconstruction error, i.e. the difference between the currently-stage reconstructed image and the ground truth image, and adaptively allocate samples to different regions at the successive sampling stage. Furthermore, we propose a cascaded feature fusion reconstruction network that could efficiently utilize the information derived from different adaptive sampling stages. The effectiveness of the proposed adaptive and cascaded CS method is demonstrated with extensive quantitative and qualitative results, compared with the state-of-the-art CS algorithms.