 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive and Cascaded Compressive Sensing
Paper and Code
Mar 21, 2022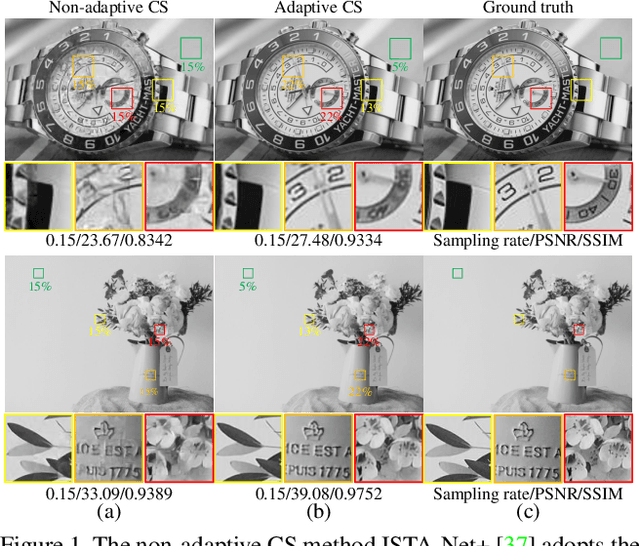
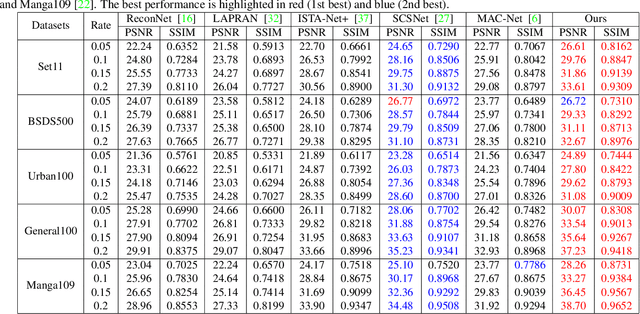
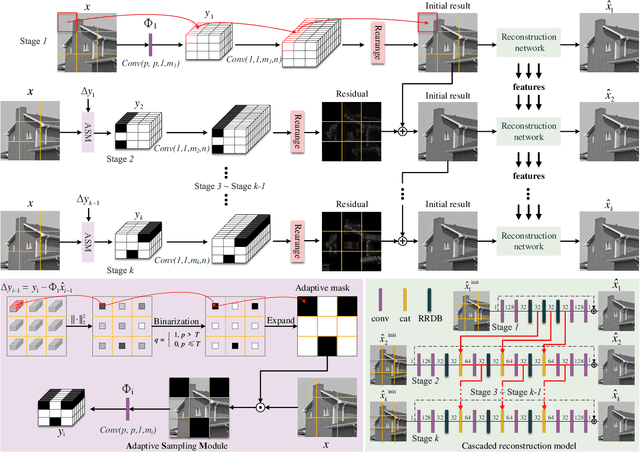
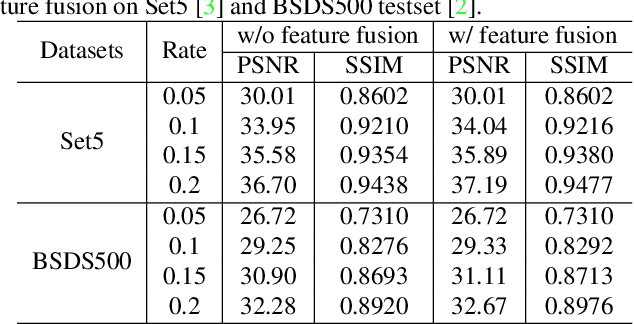
Scene-dependent adaptive compressive sensing (CS) has been a long pursuing goal which has huge potential in significantly improving the performance of CS. However, without accessing to the ground truth image, how to design the scene-dependent adaptive strategy is still an open-problem and the improvement in sampling efficiency is still quite limited. In this paper, a restricted isometry property (RIP) condition based error clamping is proposed, which could directly predict the reconstruction error, i.e. the difference between the currently-stage reconstructed image and the ground truth image, and adaptively allocate samples to different regions at the successive sampling stage. Furthermore, we propose a cascaded feature fusion reconstruction network that could efficiently utilize the information derived from different adaptive sampling stages. The effectiveness of the proposed adaptive and cascaded CS method is demonstrated with extensive quantitative and qualitative results, compared with the state-of-the-art CS algorithms.