 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgemmPlace: Robust Place Recognition with Intermediate Frequency Signal of Low-cost Single-chip Millimeter Wave Radar
Mar 07, 2024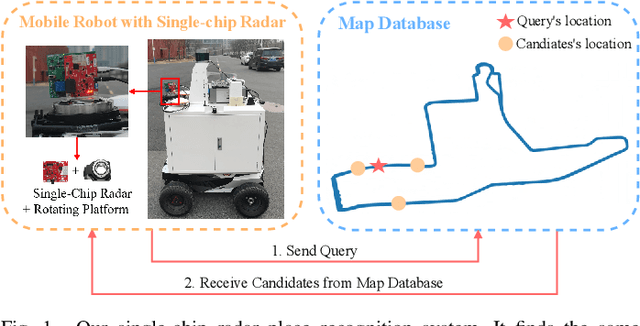

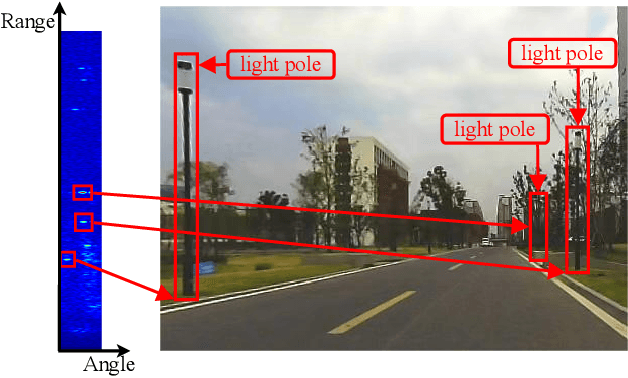
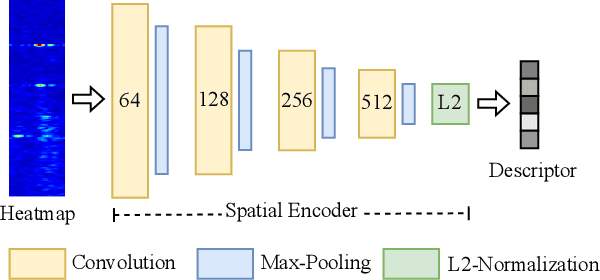
Place recognition is crucial for tasks like loop-closure detection and re-localization. Single-chip millimeter wave radar (single-chip radar in short) emerges as a low-cost sensor option for place recognition, with the advantage of insensitivity to degraded visual environments. However, it encounters two challenges. Firstly, sparse point cloud from single-chip radar leads to poor performance when using current place recognition methods, which assume much denser data. Secondly, its performance significantly declines in scenarios involving rotational and lateral variations, due to limited overlap in its field of view (FOV). We propose mmPlace, a robust place recognition system to address these challenges. Specifically, mmPlace transforms intermediate frequency (IF) signal into range azimuth heatmap and employs a spatial encoder to extract features. Additionally, to improve the performance in scenarios involving rotational and lateral variations, mmPlace employs a rotating platform and concatenates heatmaps in a rotation cycle, effectively expanding the system's FOV. We evaluate mmPlace's performance on the milliSonic dataset, which is collected on the University of Science and Technology of China (USTC) campus, the city roads surrounding the campus, and an underground parking garage. The results demonstrate that mmPlace outperforms point cloud-based methods and achieves 87.37% recall@1 in scenarios involving rotational and lateral variations.