 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAO-RONet: A Robust 4D Radar Odometry with Exploring More Information from Low-Quality Points
Mar 03, 2025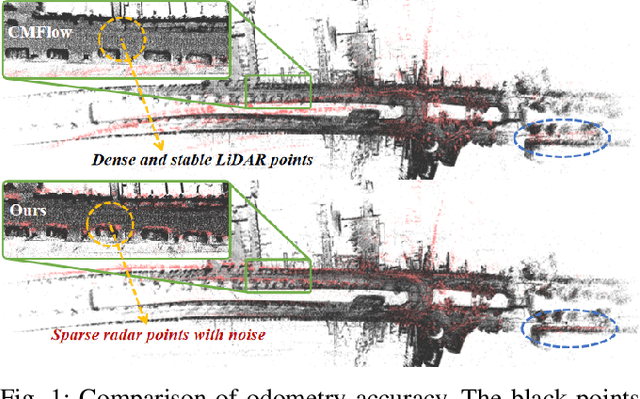
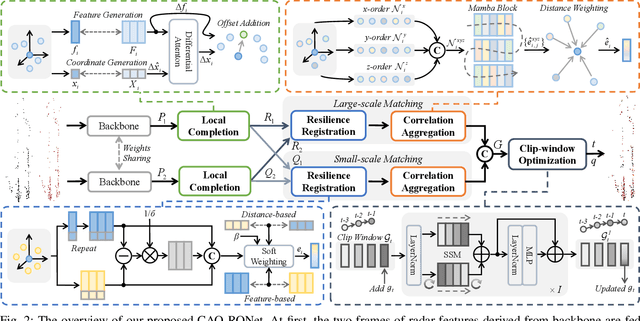
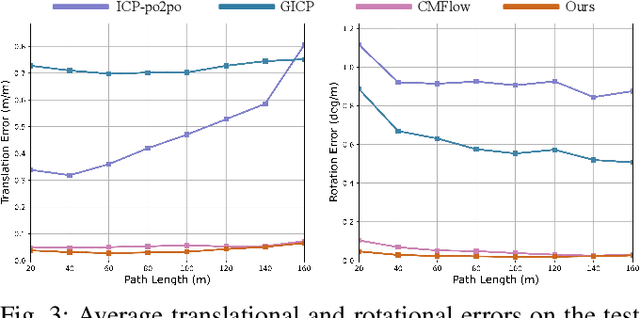
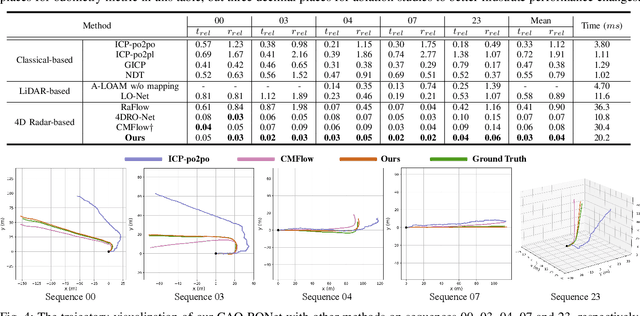
Recently, 4D millimetre-wave radar exhibits more stable perception ability than LiDAR and camera under adverse conditions (e.g. rain and fog). However, low-quality radar points hinder its application, especially the odometry task that requires a dense and accurate matching. To fully explore the potential of 4D radar, we introduce a learning-based odometry framework, enabling robust ego-motion estimation from finite and uncertain geometry information. First, for sparse radar points, we propose a local completion to supplement missing structures and provide denser guideline for aligning two frames. Then, a context-aware association with a hierarchical structure flexibly matches points of different scales aided by feature similarity, and improves local matching consistency through correlation balancing. Finally, we present a window-based optimizer that uses historical priors to establish a coupling state estimation and correct errors of inter-frame matching. The superiority of our algorithm is confirmed on View-of-Delft dataset, achieving around a 50% performance improvement over previous approaches and delivering accuracy on par with LiDAR odometry. Our code will be available.
Observation Time Difference: an Online Dynamic Objects Removal Method for Ground Vehicles
Jun 22, 2024In the process of urban environment mapping, the sequential accumulations of dynamic objects will leave a large number of traces in the map. These traces will usually have bad influences on the localization accuracy and navigation performance of the robot. Therefore, dynamic objects removal plays an important role for creating clean map. However, conventional dynamic objects removal methods usually run offline. That is, the map is reprocessed after it is constructed, which undoubtedly increases additional time costs. To tackle the problem, this paper proposes a novel method for online dynamic objects removal for ground vehicles. According to the observation time difference between the object and the ground where it is located, dynamic objects are classified into two types: suddenly appear and suddenly disappear. For these two kinds of dynamic objects, we propose downward retrieval and upward retrieval methods to eliminate them respectively. We validate our method on SemanticKITTI dataset and author-collected dataset with highly dynamic objects. Compared with other state-of-the-art methods, our method is more efficient and robust, and reduces the running time per frame by more than 60$\%$ on average.