 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFramework for Quality Evaluation of Smart Roadside Infrastructure Sensors for Automated Driving Applications
Apr 16, 2023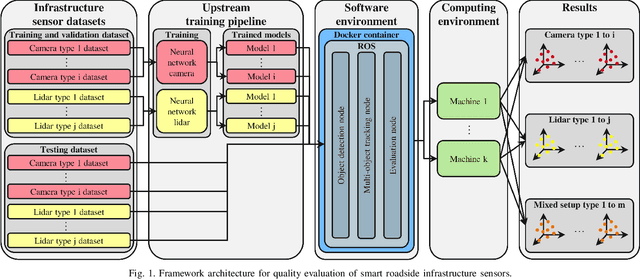
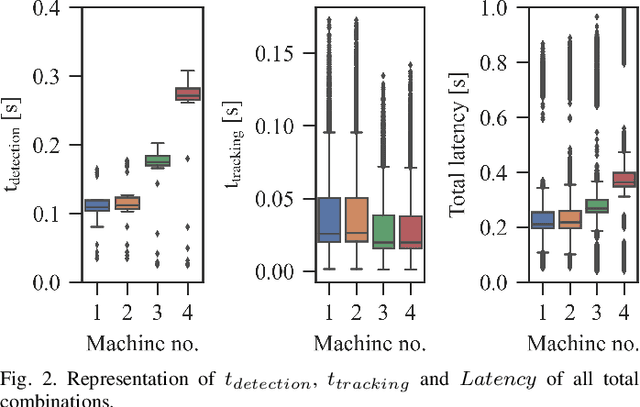
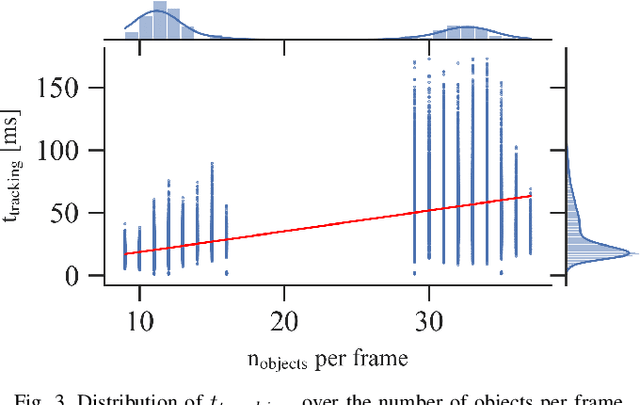
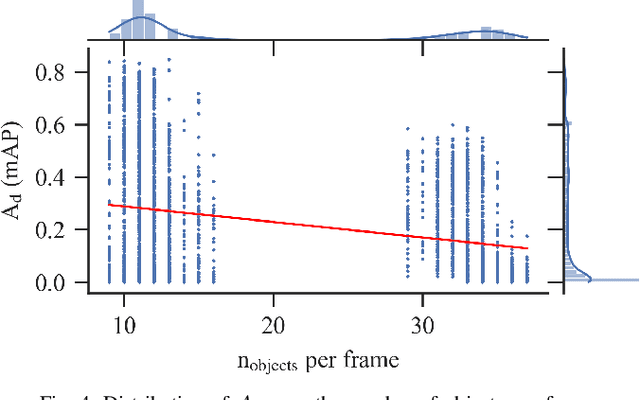
The use of smart roadside infrastructure sensors is highly relevant for future applications of connected and automated vehicles. External sensor technology in the form of intelligent transportation system stations (ITS-Ss) can provide safety-critical real-time information about road users in the form of a digital twin. The choice of sensor setups has a major influence on the downstream function as well as the data quality. To date, there is insufficient research on which sensor setups result in which levels of ITS-S data quality. We present a novel approach to perform detailed quality assessment for smart roadside infrastructure sensors. Our framework is multimodal across different sensor types and is evaluated on the DAIR-V2X dataset. We analyze the composition of different lidar and camera sensors and assess them in terms of accuracy, latency, and reliability. The evaluations show that the framework can be used reliably for several future ITS-S applications.
Stationary Diffusion State Neural Estimation for Multiview Clustering
Dec 02, 2021



Although many graph-based clustering methods attempt to model the stationary diffusion state in their objectives, their performance limits to using a predefined graph. We argue that the estimation of the stationary diffusion state can be achieved by gradient descent over neural networks. We specifically design the Stationary Diffusion State Neural Estimation (SDSNE) to exploit multiview structural graph information for co-supervised learning. We explore how to design a graph neural network specially for unsupervised multiview learning and integrate multiple graphs into a unified consensus graph by a shared self-attentional module. The view-shared self-attentional module utilizes the graph structure to learn a view-consistent global graph. Meanwhile, instead of using auto-encoder in most unsupervised learning graph neural networks, SDSNE uses a co-supervised strategy with structure information to supervise the model learning. The co-supervised strategy as the loss function guides SDSNE in achieving the stationary state. With the help of the loss and the self-attentional module, we learn to obtain a graph in which nodes in each connected component fully connect by the same weight. Experiments on several multiview datasets demonstrate effectiveness of SDSNE in terms of six clustering evaluation metrics.
* AAAI 2022