 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Rate-Quality Model for Learned Video Coding
May 05, 2025

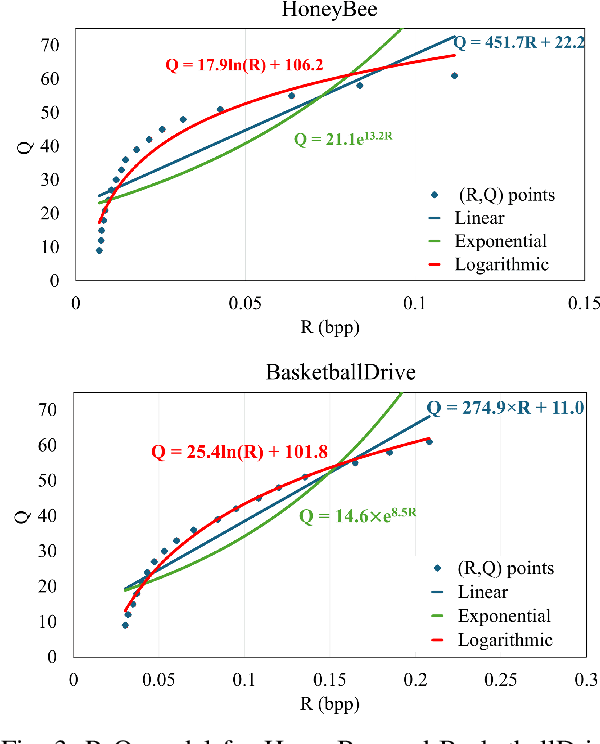

Learned video coding (LVC) has recently achieved superior coding performance. In this paper, we model the rate-quality (R-Q) relationship for learned video coding by a parametric function. We learn a neural network, termed RQNet, to characterize the relationship between the bitrate and quality level according to video content and coding context. The predicted (R,Q) results are further integrated with those from previously coded frames using the least-squares method to determine the parameters of our R-Q model on-the-fly. Compared to the conventional approaches, our method accurately estimates the R-Q relationship, enabling the online adaptation of model parameters to enhance both flexibility and precision. Experimental results show that our R-Q model achieves significantly smaller bitrate deviations than the baseline method on commonly used datasets with minimal additional complexity.
MaskCRT: Masked Conditional Residual Transformer for Learned Video Compression
Dec 25, 2023Conditional coding has lately emerged as the mainstream approach to learned video compression. However, a recent study shows that it may perform worse than residual coding when the information bottleneck arises. Conditional residual coding was thus proposed, creating a new school of thought to improve on conditional coding. Notably, conditional residual coding relies heavily on the assumption that the residual frame has a lower entropy rate than that of the intra frame. Recognizing that this assumption is not always true due to dis-occlusion phenomena or unreliable motion estimates, we propose a masked conditional residual coding scheme. It learns a soft mask to form a hybrid of conditional coding and conditional residual coding in a pixel adaptive manner. We introduce a Transformer-based conditional autoencoder. Several strategies are investigated with regard to how to condition a Transformer-based autoencoder for inter-frame coding, a topic that is largely under-explored. Additionally, we propose a channel transform module (CTM) to decorrelate the image latents along the channel dimension, with the aim of using the simple hyperprior to approach similar compression performance to the channel-wise autoregressive model. Experimental results confirm the superiority of our masked conditional residual transformer (termed MaskCRT) to both conditional coding and conditional residual coding. On commonly used datasets, MaskCRT shows comparable BD-rate results to VTM-17.0 under the low delay P configuration in terms of PSNR-RGB. It also opens up a new research direction for advancing learned video compression.
DentiBot: System Design and 6-DoF Hybrid Position/Force Control for Robot-Assisted Endodontic Treatment
Oct 15, 2023



Robotic technologies are becoming increasingly popular in dentistry due to the high level of precision required in delicate dental procedures. Most dental robots available today are designed for implant surgery, helping dentists to accurately place implants in the desired position and depth. In this paper, we introduce the DentiBot, the first robot specifically designed for dental endodontic treatment. The DentiBot is equipped with a force and torque sensor, as well as a string-based Patient Tracking Module, allowing for real-time monitoring of endodontic file contact and patient movement. We propose a 6-DoF hybrid position/force controller that enables autonomous adjustment of the surgical path and compensation for patient movement, while also providing protection against endodontic file fracture. In addition, a file flexibility model is incorporated to compensate for file bending. Pre-clinical evaluations performed on acrylic root canal models and resin teeth confirm the feasibility of the DentiBot in assisting endodontic treatment.