 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlling a Robotic Stereo Camera Under Image Quantization Noise
Jan 14, 2018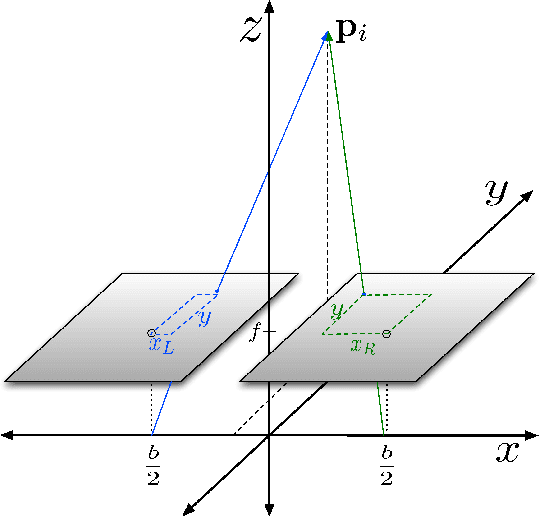
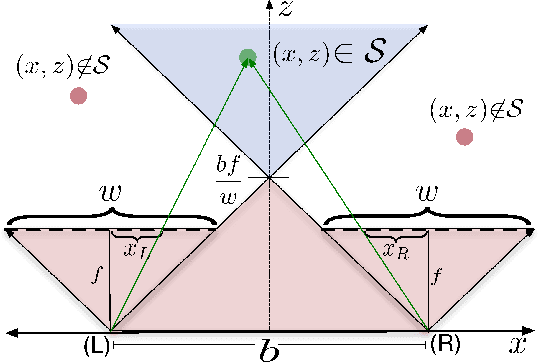

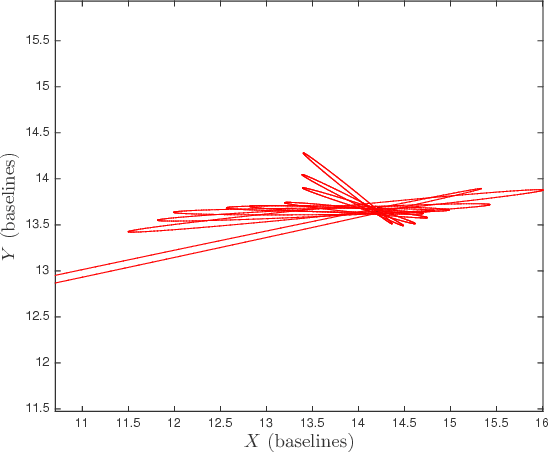
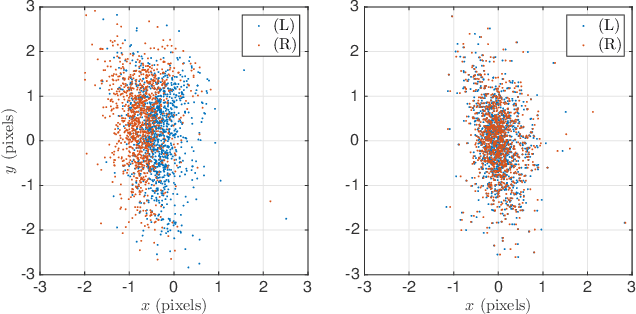
In this paper, we address the problem of controlling a mobile stereo camera under image quantization noise. Assuming that a pair of images of a set of targets is available, the camera moves through a sequence of Next-Best-Views (NBVs), i.e., a sequence of views that minimize the trace of the targets' cumulative state covariance, constructed using a realistic model of the stereo rig that captures image quantization noise and a Kalman Filter (KF) that fuses the observation history with new information. The proposed algorithm decomposes control into two stages: first the NBV is computed in the camera relative coordinates, and then the camera moves to realize this view in the fixed global coordinate frame. This decomposition allows the camera to drive to a new pose that effectively realizes the NBV in camera coordinates while satisfying Field-of-View constraints in global coordinates, a task that is particularly challenging using complex sensing models. We provide simulations and real experiments that illustrate the ability of the proposed mobile camera system to accurately localize sets of targets. We also propose a novel data-driven technique to characterize unmodeled uncertainty, such as calibration errors, at the pixel level and show that this method ensures stability of the KF.
Distributed Hierarchical Control for State Estimation With Robotic Sensor Networks
Jan 14, 2018
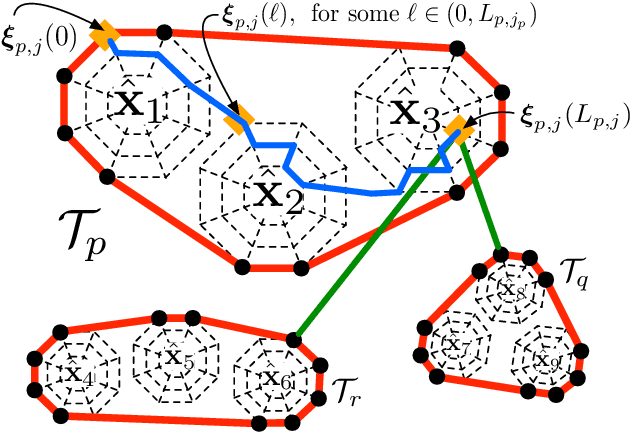
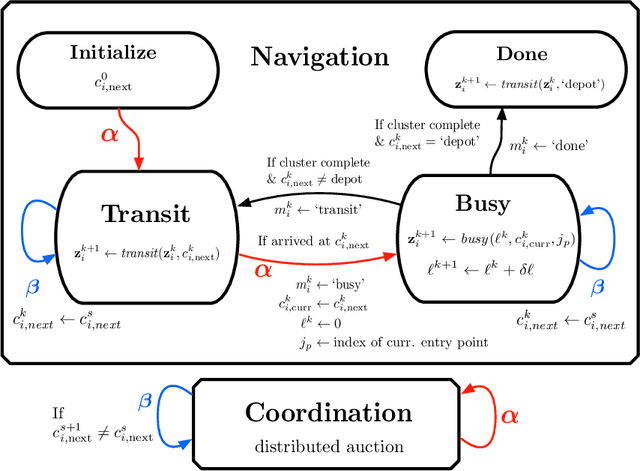
This paper addresses active state estimation with a team of robotic sensors. The states to be estimated are represented by spatially distributed, uncorrelated, stationary vectors. Given a prior belief on the geographic locations of the states, we cluster the states in moderately sized groups and propose a new hierarchical Dynamic Programming (DP) framework to compute optimal sensing policies for each cluster that mitigates the computational cost of planning optimal policies in the combined belief space. Then, we develop a decentralized assignment algorithm that dynamically allocates clusters to robots based on the pre-computed optimal policies at each cluster. The integrated distributed state estimation framework is optimal at the cluster level but also scales very well to large numbers of states and robot sensors. We demonstrate efficiency of the proposed method in both simulations and real-world experiments using stereoscopic vision sensors.
Distributed Active State Estimation with User-Specified Accuracy
Jan 14, 2018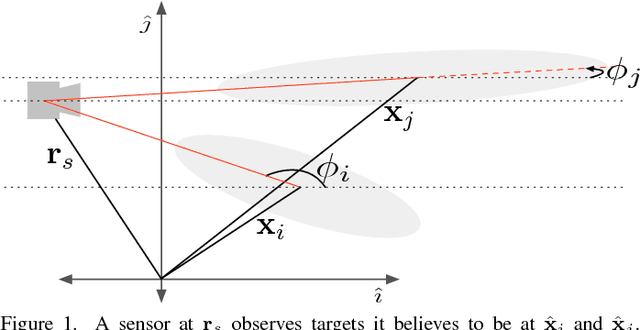
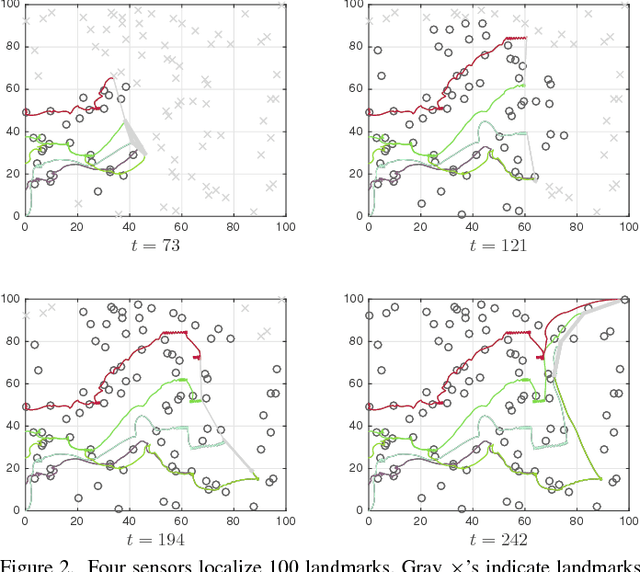
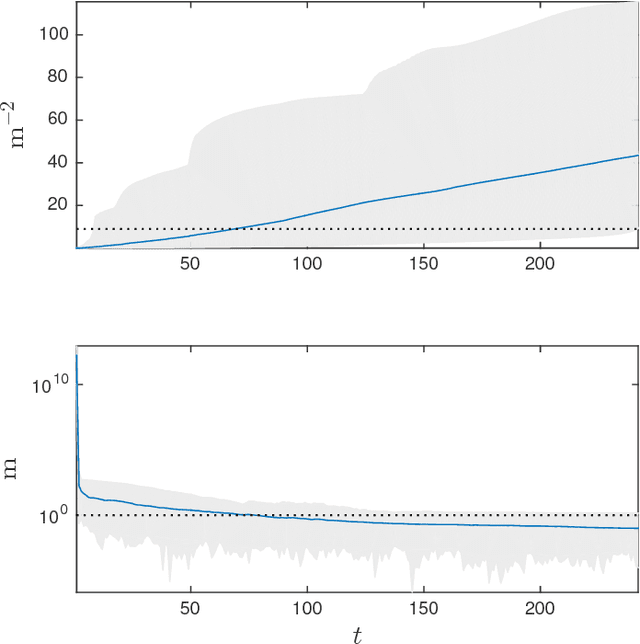
In this paper, we address the problem of controlling a network of mobile sensors so that a set of hidden states are estimated up to a user-specified accuracy. The sensors take measurements and fuse them online using an Information Consensus Filter (ICF). At the same time, the local estimates guide the sensors to their next best configuration. This leads to an LMI-constrained optimization problem that we solve by means of a new distributed random approximate projections method. The new method is robust to the state disagreement errors that exist among the robots as the ICF fuses the collected measurements. Assuming that the noise corrupting the measurements is zero-mean and Gaussian and that the robots are self localized in the environment, the integrated system converges to the next best positions from where new observations will be taken. This process is repeated with the robots taking a sequence of observations until the hidden states are estimated up to the desired user-specified accuracy. We present simulations of sparse landmark localization, where the robotic team achieves the desired estimation tolerances while exhibiting interesting emergent behavior.