 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning to Learn: A Novel Algorithm for Active Learning during Model-Based Planning
Aug 15, 2023Active Inference is a recent framework for modeling planning under uncertainty. Empirical and theoretical work have now begun to evaluate the strengths and weaknesses of this approach and how it might be improved. A recent extension - the sophisticated inference (SI) algorithm - improves performance on multi-step planning problems through recursive decision tree search. However, little work to date has been done to compare SI to other established planning algorithms. SI was also developed with a focus on inference as opposed to learning. The present paper has two aims. First, we compare performance of SI to Bayesian reinforcement learning (RL) schemes designed to solve similar problems. Second, we present an extension of SI - sophisticated learning (SL) - that more fully incorporates active learning during planning. SL maintains beliefs about how model parameters would change under the future observations expected under each policy. This allows a form of counterfactual retrospective inference in which the agent considers what could be learned from current or past observations given different future observations. To accomplish these aims, we make use of a novel, biologically inspired environment designed to highlight the problem structure for which SL offers a unique solution. Here, an agent must continually search for available (but changing) resources in the presence of competing affordances for information gain. Our simulations show that SL outperforms all other algorithms in this context - most notably, Bayes-adaptive RL and upper confidence bound algorithms, which aim to solve multi-step planning problems using similar principles (i.e., directed exploration and counterfactual reasoning). These results provide added support for the utility of Active Inference in solving this class of biologically-relevant problems and offer added tools for testing hypotheses about human cognition.
Online reinforcement learning with sparse rewards through an active inference capsule
Jun 04, 2021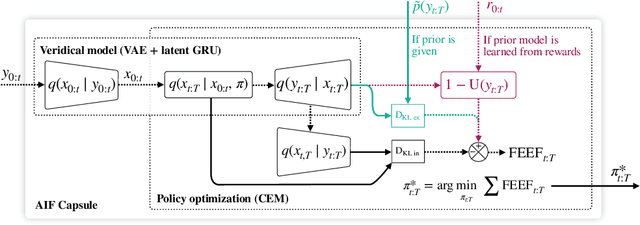
Intelligent agents must pursue their goals in complex environments with partial information and often limited computational capacity. Reinforcement learning methods have achieved great success by creating agents that optimize engineered reward functions, but which often struggle to learn in sparse-reward environments, generally require many environmental interactions to perform well, and are typically computationally very expensive. Active inference is a model-based approach that directs agents to explore uncertain states while adhering to a prior model of their goal behaviour. This paper introduces an active inference agent which minimizes the novel free energy of the expected future. Our model is capable of solving sparse-reward problems with a very high sample efficiency due to its objective function, which encourages directed exploration of uncertain states. Moreover, our model is computationally very light and can operate in a fully online manner while achieving comparable performance to offline RL methods. We showcase the capabilities of our model by solving the mountain car problem, where we demonstrate its superior exploration properties and its robustness to observation noise, which in fact improves performance. We also introduce a novel method for approximating the prior model from the reward function, which simplifies the expression of complex objectives and improves performance over previous active inference approaches.