 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline reinforcement learning with sparse rewards through an active inference capsule
Jun 04, 2021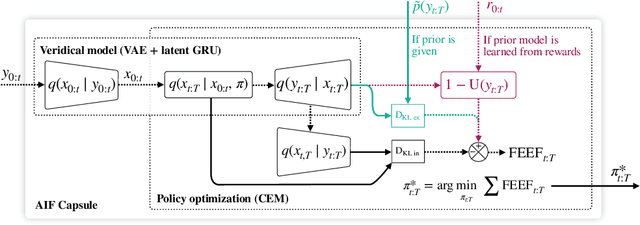
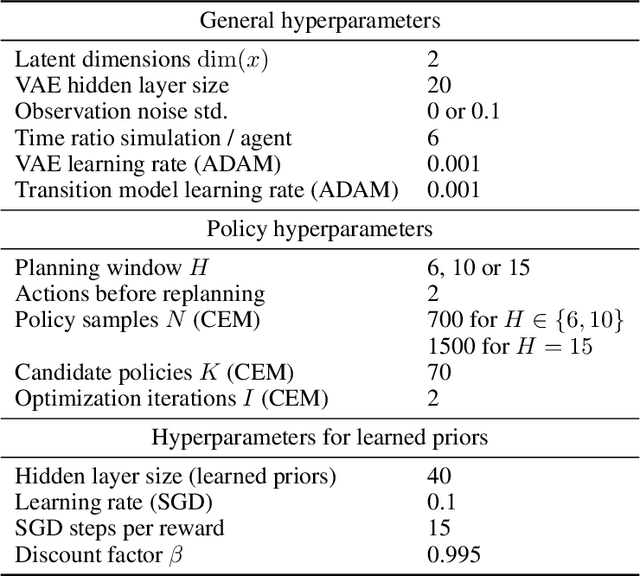
Intelligent agents must pursue their goals in complex environments with partial information and often limited computational capacity. Reinforcement learning methods have achieved great success by creating agents that optimize engineered reward functions, but which often struggle to learn in sparse-reward environments, generally require many environmental interactions to perform well, and are typically computationally very expensive. Active inference is a model-based approach that directs agents to explore uncertain states while adhering to a prior model of their goal behaviour. This paper introduces an active inference agent which minimizes the novel free energy of the expected future. Our model is capable of solving sparse-reward problems with a very high sample efficiency due to its objective function, which encourages directed exploration of uncertain states. Moreover, our model is computationally very light and can operate in a fully online manner while achieving comparable performance to offline RL methods. We showcase the capabilities of our model by solving the mountain car problem, where we demonstrate its superior exploration properties and its robustness to observation noise, which in fact improves performance. We also introduce a novel method for approximating the prior model from the reward function, which simplifies the expression of complex objectives and improves performance over previous active inference approaches.