 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Scale Discrepancies in Robotic Control via Language-Based Action Representations
Dec 09, 2025Recent end-to-end robotic manipulation research increasingly adopts architectures inspired by large language models to enable robust manipulation. However, a critical challenge arises from severe distribution shifts between robotic action data, primarily due to substantial numerical variations in action commands across diverse robotic platforms and tasks, hindering the effective transfer of pretrained knowledge. To address this limitation, we propose a semantically grounded linguistic representation to normalize actions for efficient pretraining. Unlike conventional discretized action representations that are sensitive to numerical scales, the motion representation specifically disregards numeric scale effects, emphasizing directionality instead. This abstraction mitigates distribution shifts, yielding a more generalizable pretraining representation. Moreover, using the motion representation narrows the feature distance between action tokens and standard vocabulary tokens, mitigating modality gaps. Multi-task experiments on two benchmarks demonstrate that the proposed method significantly improves generalization performance and transferability in robotic manipulation tasks.
iFlyBot-VLM Technical Report
Nov 07, 2025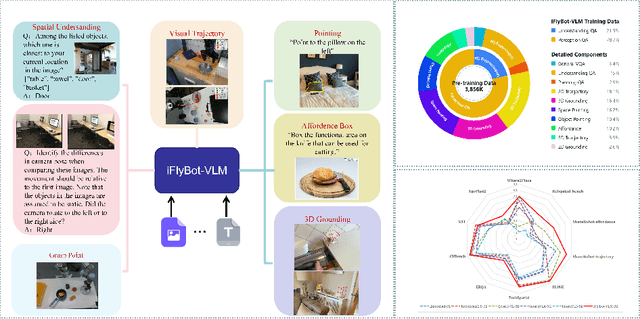

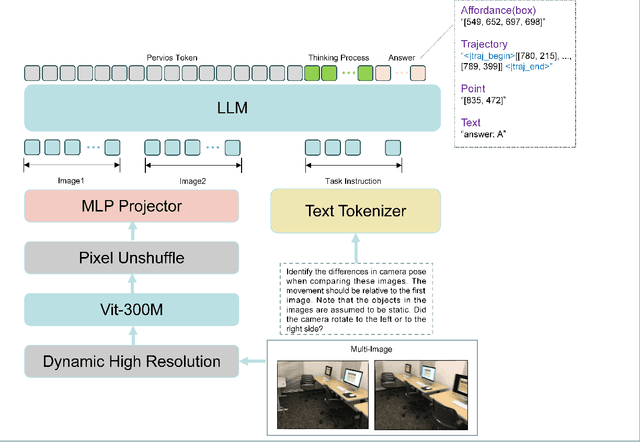
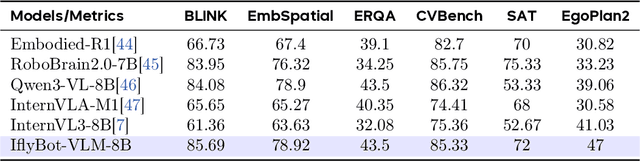
We introduce iFlyBot-VLM, a general-purpose Vision-Language Model (VLM) used to improve the domain of Embodied Intelligence. The central objective of iFlyBot-VLM is to bridge the cross-modal semantic gap between high-dimensional environmental perception and low-level robotic motion control. To this end, the model abstracts complex visual and spatial information into a body-agnostic and transferable Operational Language, thereby enabling seamless perception-action closed-loop coordination across diverse robotic platforms. The architecture of iFlyBot-VLM is systematically designed to realize four key functional capabilities essential for embodied intelligence: 1) Spatial Understanding and Metric Reasoning; 2) Interactive Target Grounding; 3) Action Abstraction and Control Parameter Generation; 4) Task Planning and Skill Sequencing. We envision iFlyBot-VLM as a scalable and generalizable foundation model for embodied AI, facilitating the progression from specialized task-oriented systems toward generalist, cognitively capable agents. We conducted evaluations on 10 current mainstream embodied intelligence-related VLM benchmark datasets, such as Blink and Where2Place, and achieved optimal performance while preserving the model's general capabilities. We will publicly release both the training data and model weights to foster further research and development in the field of Embodied Intelligence.
High-Precision Transformer-Based Visual Servoing for Humanoid Robots in Aligning Tiny Objects
Mar 06, 2025



High-precision tiny object alignment remains a common and critical challenge for humanoid robots in real-world. To address this problem, this paper proposes a vision-based framework for precisely estimating and controlling the relative position between a handheld tool and a target object for humanoid robots, e.g., a screwdriver tip and a screw head slot. By fusing images from the head and torso cameras on a robot with its head joint angles, the proposed Transformer-based visual servoing method can correct the handheld tool's positional errors effectively, especially at a close distance. Experiments on M4-M8 screws demonstrate an average convergence error of 0.8-1.3 mm and a success rate of 93\%-100\%. Through comparative analysis, the results validate that this capability of high-precision tiny object alignment is enabled by the Distance Estimation Transformer architecture and the Multi-Perception-Head mechanism proposed in this paper.
Deep Reinforcement Learning in Autonomous Car Path Planning and Control: A Survey
Mar 30, 2024Combining data-driven applications with control systems plays a key role in recent Autonomous Car research. This thesis offers a structured review of the latest literature on Deep Reinforcement Learning (DRL) within the realm of autonomous vehicle Path Planning and Control. It collects a series of DRL methodologies and algorithms and their applications in the field, focusing notably on their roles in trajectory planning and dynamic control. In this review, we delve into the application outcomes of DRL technologies in this domain. By summarizing these literatures, we highlight potential challenges, aiming to offer insights that might aid researchers engaged in related fields.