 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreen-Blue Stripe Pattern for Range Sensing from a Single Image
Jan 09, 2017
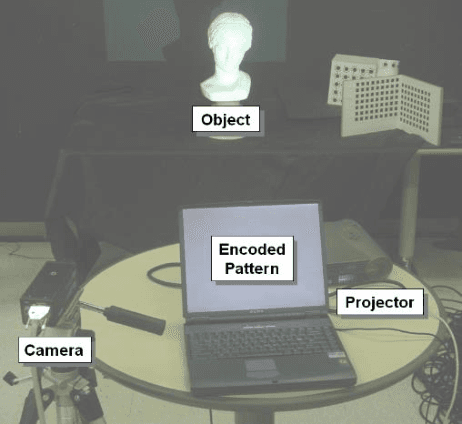
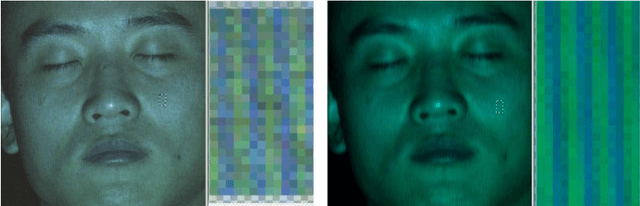
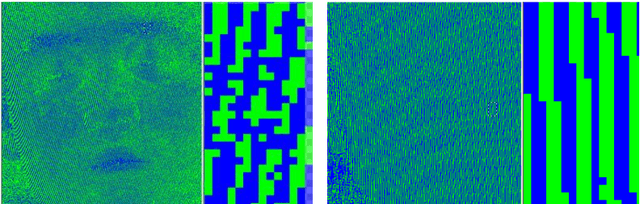
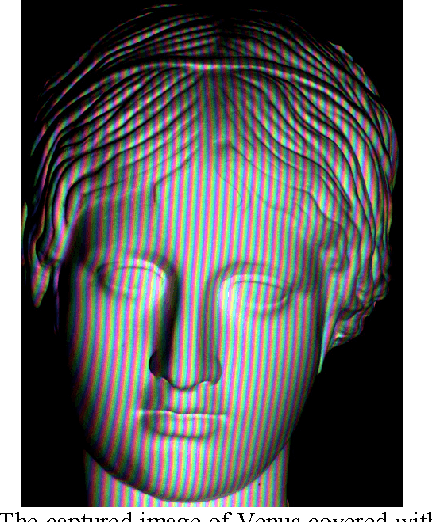
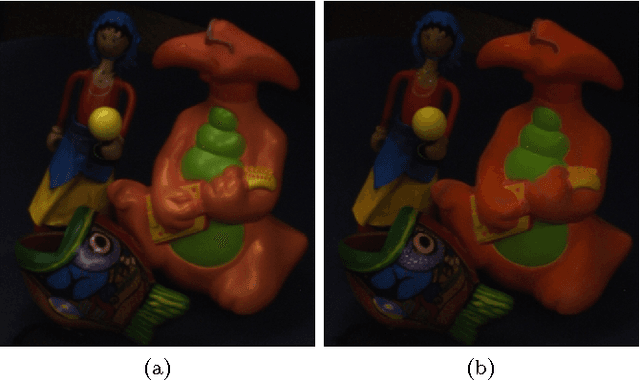
In this paper, we present a novel method for rapid high-resolution range sensing using green-blue stripe pattern. We use green and blue for designing high-frequency stripe projection pattern. For accurate and reliable range recovery, we identify the stripe patterns by our color-stripe segmentation and unwrapping algorithms. The experimental result for a naked human face shows the effectiveness of our method.
* 8 pages, 5 figures. Updated version of a conference paper
Color-Stripe Structured Light Robust to Surface Color and Discontinuity
Sep 18, 2015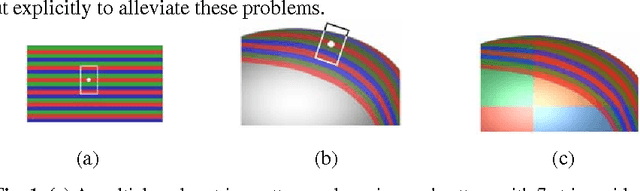
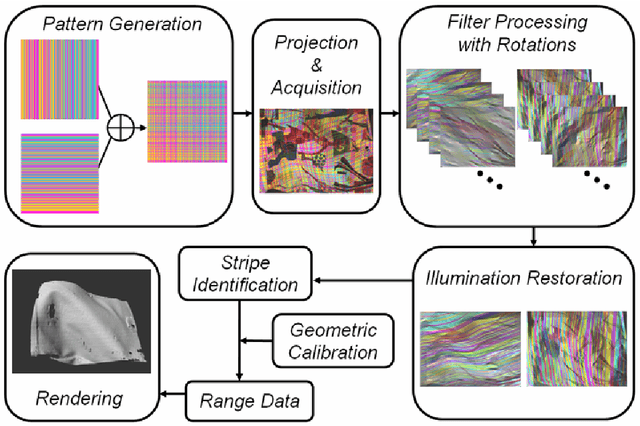
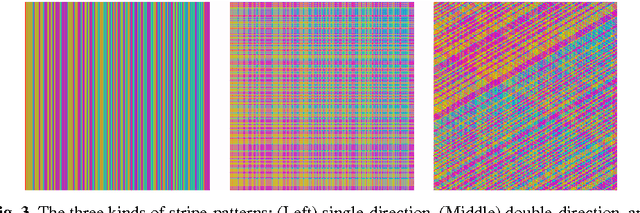
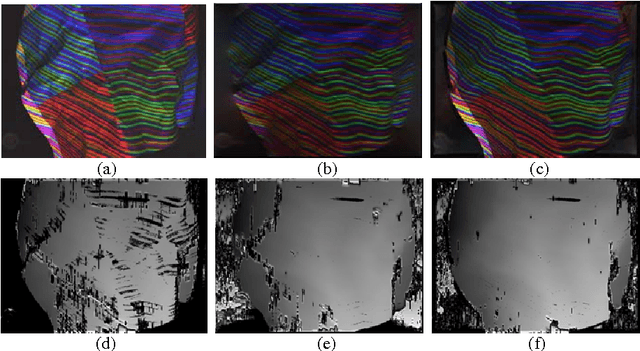
Multiple color stripes have been employed for structured light-based rapid range imaging to increase the number of uniquely identifiable stripes. The use of multiple color stripes poses two problems: (1) object surface color may disturb the stripe color and (2) the number of adjacent stripes required for identifying a stripe may not be maintained near surface discontinuities such as occluding boundaries. In this paper, we present methods to alleviate those problems. Log-gradient filters are employed to reduce the influence of object colors, and color stripes in two and three directions are used to increase the chance of identifying correct stripes near surface discontinuities. Experimental results demonstrate the effectiveness of our methods.
* 10 pages, 9 figures, 8th Asian Conference on Computer Vision (ACCV), Tokyo, Japan, November 2007, Proceedings, Part II
Color-Phase Analysis for Sinusoidal Structured Light in Rapid Range Imaging
Sep 14, 2015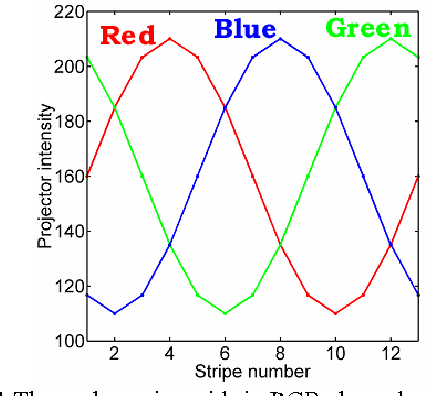
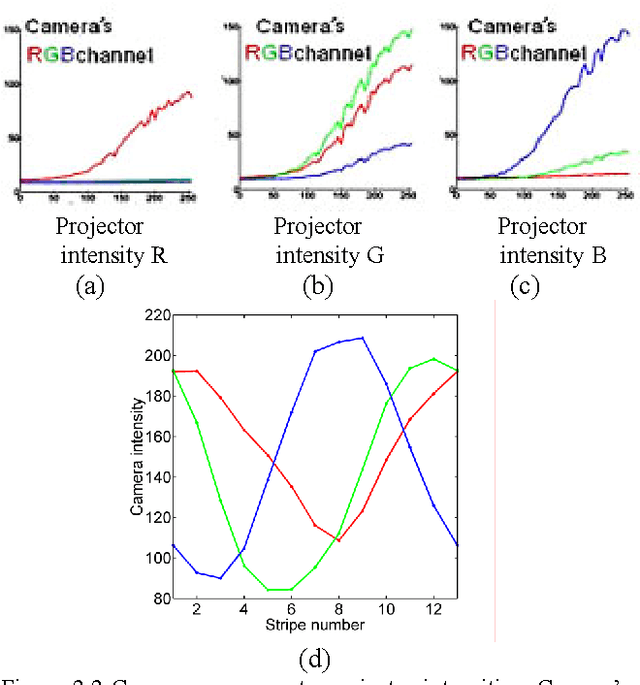
Active range sensing using structured-light is the most accurate and reliable method for obtaining 3D information. However, most of the work has been limited to range sensing of static objects, and range sensing of dynamic (moving or deforming) objects has been investigated recently only by a few researchers. Sinusoidal structured-light is one of the well-known optical methods for 3D measurement. In this paper, we present a novel method for rapid high-resolution range imaging using color sinusoidal pattern. We consider the real-world problem of nonlinearity and color-band crosstalk in the color light projector and color camera, and present methods for accurate recovery of color-phase. For high-resolution ranging, we use high-frequency patterns and describe new unwrapping algorithms for reliable range recovery. The experimental results demonstrate the effectiveness of our methods.
* 6 pages, 12 figures. 6th Asian Conference on Computer Vision (ACCV 2004)
Multi-Projector Color Structured-Light Vision
Aug 31, 2015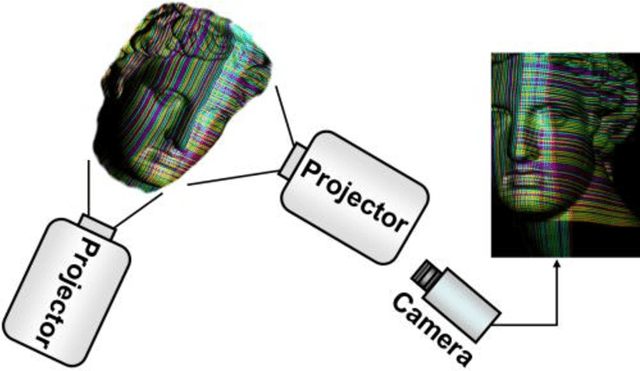
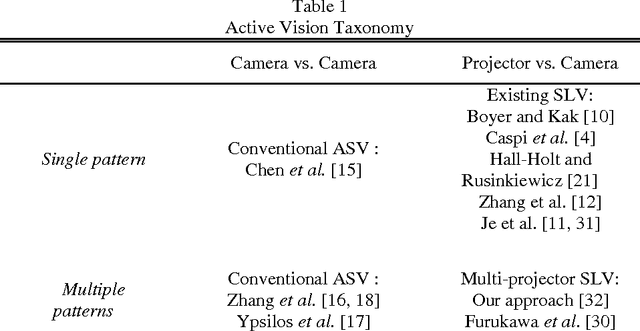
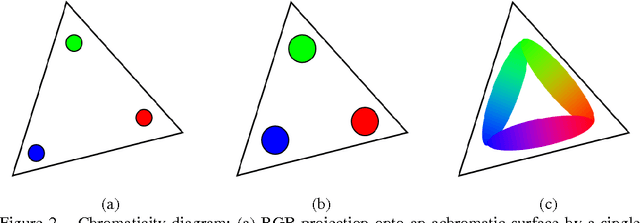
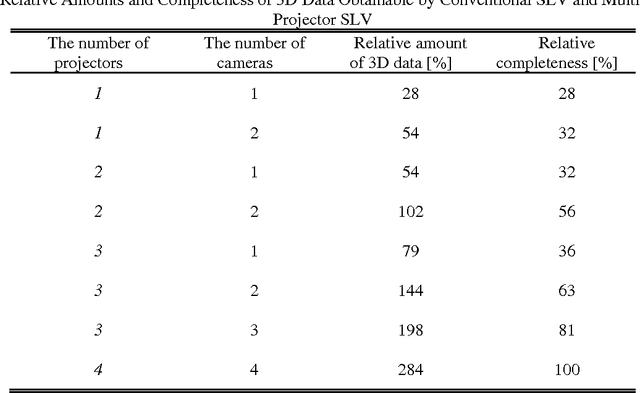
Research interest in rapid structured-light imaging has grown increasingly for the modeling of moving objects, and a number of methods have been suggested for the range capture in a single video frame. The imaging area of a 3D object using a single projector is restricted since the structured light is projected only onto a limited area of the object surface. Employing additional projectors to broaden the imaging area is a challenging problem since simultaneous projection of multiple patterns results in their superposition in the light-intersected areas and the recognition of original patterns is by no means trivial. This paper presents a novel method of multi-projector color structured-light vision based on projector-camera triangulation. By analyzing the behavior of superposed-light colors in a chromaticity domain, we show that the original light colors cannot be properly extracted by the conventional direct estimation. We disambiguate multiple projectors by multiplexing the orientations of projector patterns so that the superposed patterns can be separated by explicit derivative computations. Experimental studies are carried out to demonstrate the validity of the presented method. The proposed method increases the efficiency of range acquisition compared to conventional active stereo using multiple projectors.
* 25 pages, 13 figures
PolyDepth: Real-time Penetration Depth Computation using Iterative Contact-Space Projection
Aug 25, 2015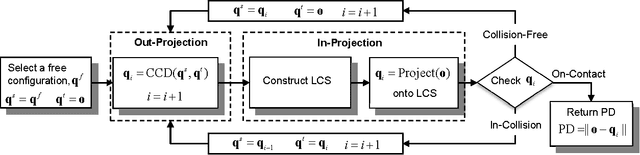

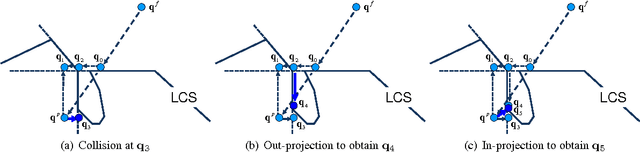

We present a real-time algorithm that finds the Penetration Depth (PD) between general polygonal models based on iterative and local optimization techniques. Given an in-collision configuration of an object in configuration space, we find an initial collision-free configuration using several methods such as centroid difference, maximally clear configuration, motion coherence, random configuration, and sampling-based search. We project this configuration on to a local contact space using a variant of continuous collision detection algorithm and construct a linear convex cone around the projected configuration. We then formulate a new projection of the in-collision configuration onto the convex cone as a Linear Complementarity Problem (LCP), which we solve using a type of Gauss-Seidel iterative algorithm. We repeat this procedure until a locally optimal PD is obtained. Our algorithm can process complicated models consisting of tens of thousands triangles at interactive rates.
* Presented in ACM SIGGRAPH 2012. 15 pages, 23 figures
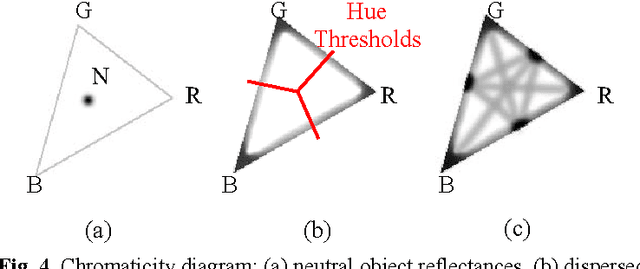
BREN: Body Reflection Essence-Neuter Model for Separation of Reflection Components
Aug 25, 2015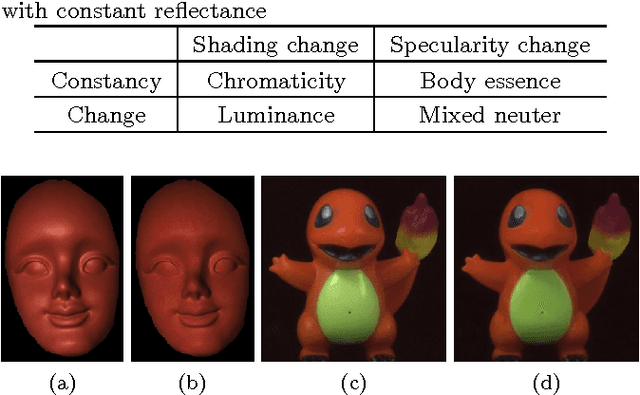
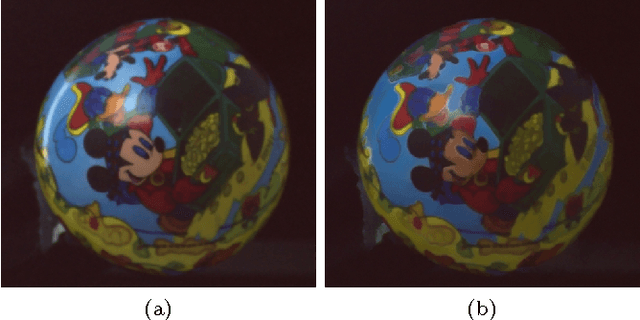
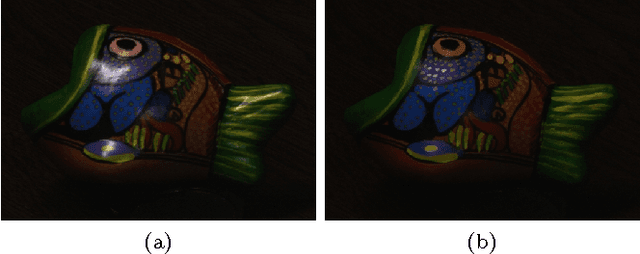
We propose a novel reflection color model consisting of body essence and (mixed) neuter, and present an effective method for separating dichromatic reflection components using a single image. Body essence is an entity invariant to interface reflection, and has two degrees of freedom unlike hue and maximum chromaticity. As a result, the proposed method is insensitive to noise and proper for colors around CMY (cyan, magenta, and yellow) as well as RGB (red, green, and blue), contrary to the maximum chromaticity-based methods. Interface reflection is separated by using a Gaussian function, which removes a critical thresholding problem. Furthermore, the method does not require any region segmentation. Experimental results show the efficacy of the proposed model and method.
* 4 pages, 4 figures
High-Contrast Color-Stripe Pattern for Rapid Structured-Light Range Imaging
Aug 20, 2015
For structured-light range imaging, color stripes can be used for increasing the number of distinguishable light patterns compared to binary BW stripes. Therefore, an appropriate use of color patterns can reduce the number of light projections and range imaging is achievable in single video frame or in "one shot". On the other hand, the reliability and range resolution attainable from color stripes is generally lower than those from multiply projected binary BW patterns since color contrast is affected by object color reflectance and ambient light. This paper presents new methods for selecting stripe colors and designing multiple-stripe patterns for "one-shot" and "two-shot" imaging. We show that maximizing color contrast between the stripes in one-shot imaging reduces the ambiguities resulting from colored object surfaces and limitations in sensor/projector resolution. Two-shot imaging adds an extra video frame and maximizes the color contrast between the first and second video frames to diminish the ambiguities even further. Experimental results demonstrate the effectiveness of the presented one-shot and two-shot color-stripe imaging schemes.
* 13 pages, 12 figures, 8th European Conference on Computer Vision (ECCV), Prague, Czech Republic, May 2004, Proceedings, Part I