 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeterministic Hypothesis Generation for Robust Fitting of Multiple Structures
Jul 25, 2018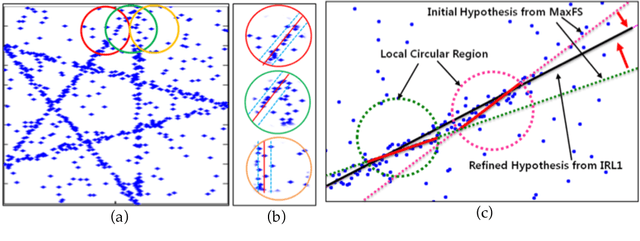
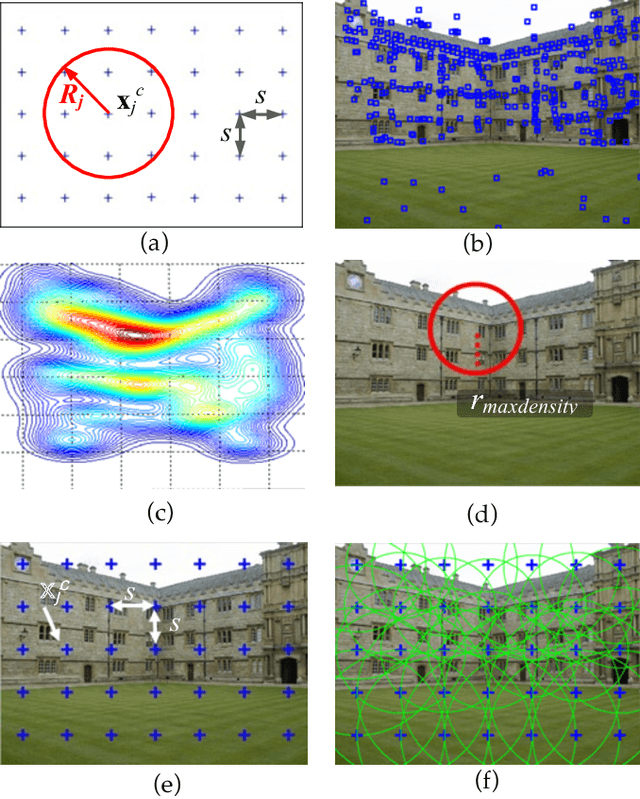
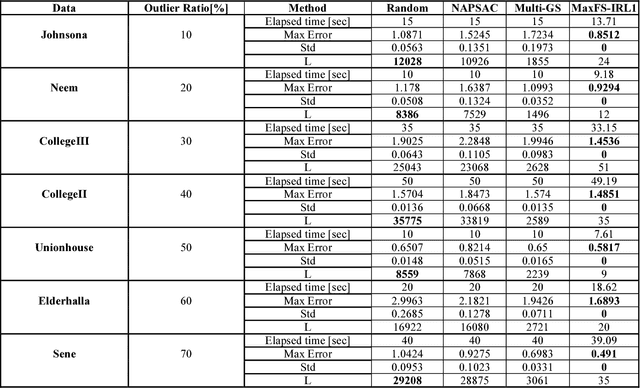
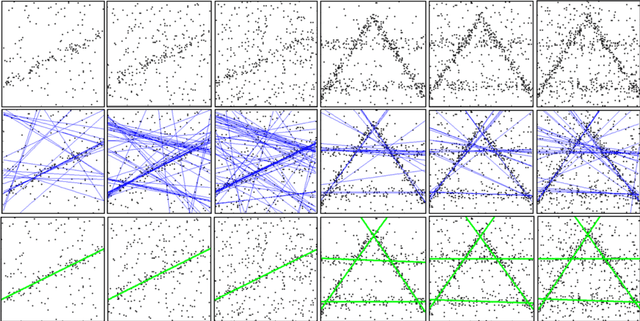
We present a novel algorithm for generating robust and consistent hypotheses for multiple-structure model fitting. Most of the existing methods utilize random sampling which produce varying results especially when outlier ratio is high. For a structure where a model is fitted, the inliers of other structures are regarded as outliers when multiple structures are present. Global optimization has recently been investigated to provide stable and unique solutions, but the computational cost of the algorithms is prohibitively high for most image data with reasonable sizes. The algorithm presented in this paper uses a maximum feasible subsystem (MaxFS) algorithm to generate consistent initial hypotheses only from partial datasets in spatially overlapping local image regions. Our assumption is that each genuine structure will exist as a dominant structure in at least one of the local regions. To refine initial hypotheses estimated from partial datasets and to remove residual tolerance dependency of the MaxFS algorithm, iterative re-weighted L1 (IRL1) minimization is performed for all the image data. Initial weights of IRL1 framework are determined from the initial hypotheses generated in local regions. Our approach is significantly more efficient than those that use only global optimization for all the image data. Experimental results demonstrate that the presented method can generate more reliable and consistent hypotheses than random-sampling methods for estimating single and multiple structures from data with a large amount of outliers. We clearly expose the influence of algorithm parameter settings on the results in our experiments.
Deterministic Fitting of Multiple Structures using Iterative MaxFS with Inlier Scale Estimation and Subset Updating
Jul 24, 2018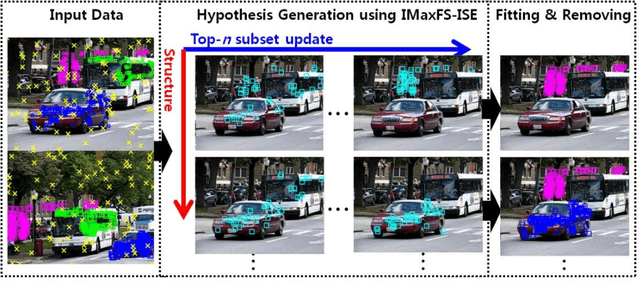
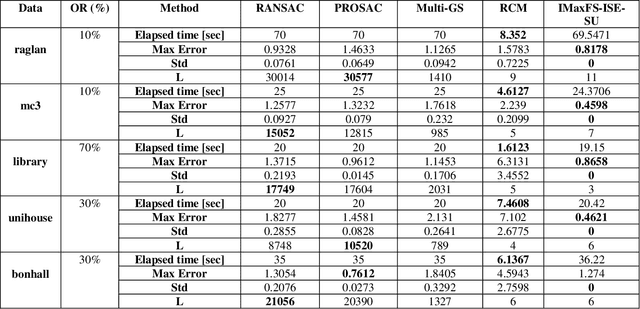
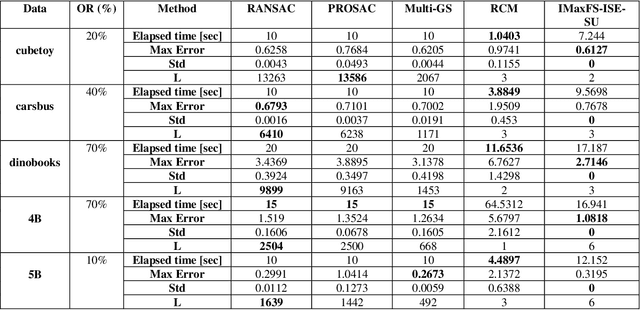
We present an efficient deterministic hypothesis generation algorithm for robust fitting of multiple structures based on the maximum feasible subsystem (MaxFS) framework. Despite its advantage, a global optimization method such as MaxFS has two main limitations for geometric model fitting. First, its performance is much influenced by the user-specified inlier scale. Second, it is computationally inefficient for large data. The presented MaxFS-based algorithm iteratively estimates model parameters and inlier scale and also overcomes the second limitation by reducing data for the MaxFS problem. Further it generates hypotheses only with top-n ranked subsets based on matching scores and data fitting residuals. This reduction of data for the MaxFS problem makes the algorithm computationally realistic. Our method, called iterative MaxFS with inlier scale estimation and subset updating (IMaxFS-ISE-SU) in this paper, performs hypothesis generation and fitting alternately until all of true structures are found. The IMaxFS-ISE-SU algorithm generates substantially more reliable hypotheses than random sampling-based methods especially as (pseudo-)outlier ratios increase. Experimental results demonstrate that our method can generate more reliable and consistent hypotheses than random sampling-based methods for estimating multiple structures from data with many outliers.
Green-Blue Stripe Pattern for Range Sensing from a Single Image
Jan 09, 2017
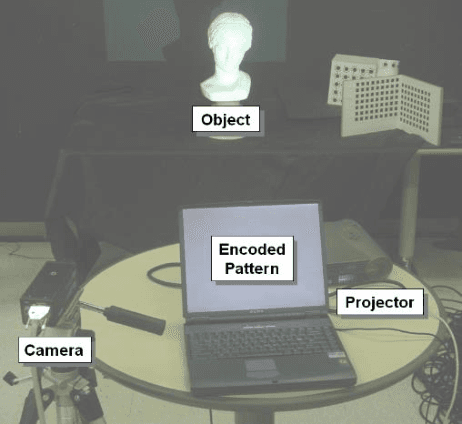
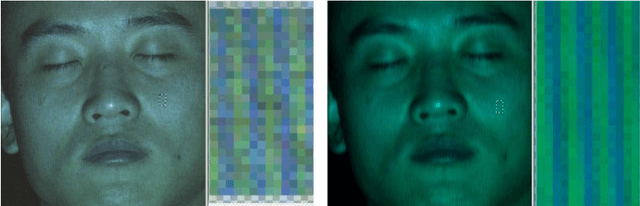
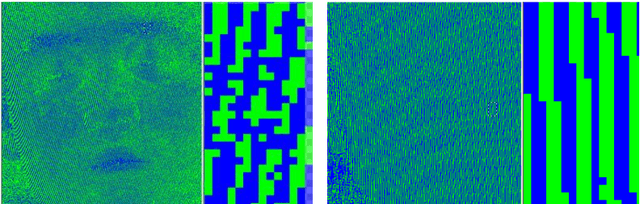
In this paper, we present a novel method for rapid high-resolution range sensing using green-blue stripe pattern. We use green and blue for designing high-frequency stripe projection pattern. For accurate and reliable range recovery, we identify the stripe patterns by our color-stripe segmentation and unwrapping algorithms. The experimental result for a naked human face shows the effectiveness of our method.
* 8 pages, 5 figures. Updated version of a conference paper
Color-Stripe Structured Light Robust to Surface Color and Discontinuity
Sep 18, 2015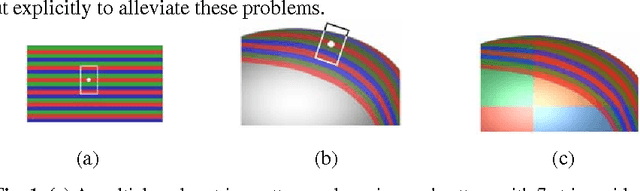
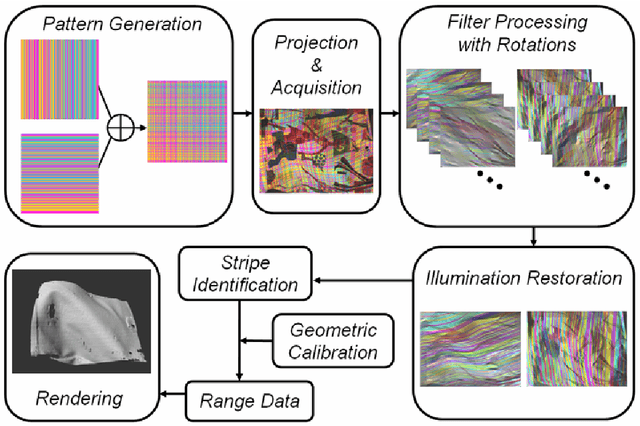
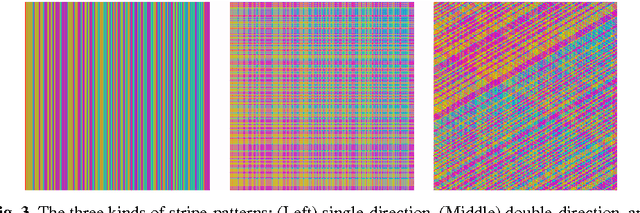
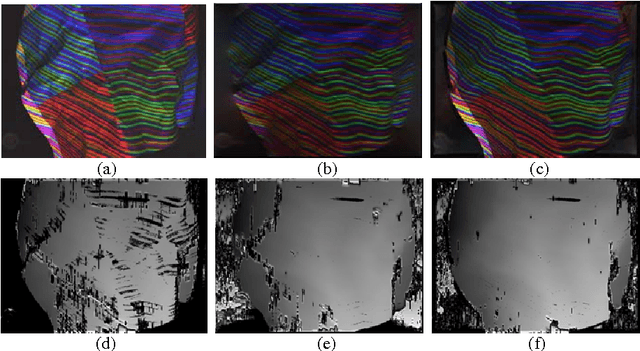
Multiple color stripes have been employed for structured light-based rapid range imaging to increase the number of uniquely identifiable stripes. The use of multiple color stripes poses two problems: (1) object surface color may disturb the stripe color and (2) the number of adjacent stripes required for identifying a stripe may not be maintained near surface discontinuities such as occluding boundaries. In this paper, we present methods to alleviate those problems. Log-gradient filters are employed to reduce the influence of object colors, and color stripes in two and three directions are used to increase the chance of identifying correct stripes near surface discontinuities. Experimental results demonstrate the effectiveness of our methods.
* 10 pages, 9 figures, 8th Asian Conference on Computer Vision (ACCV), Tokyo, Japan, November 2007, Proceedings, Part II
Color-Phase Analysis for Sinusoidal Structured Light in Rapid Range Imaging
Sep 14, 2015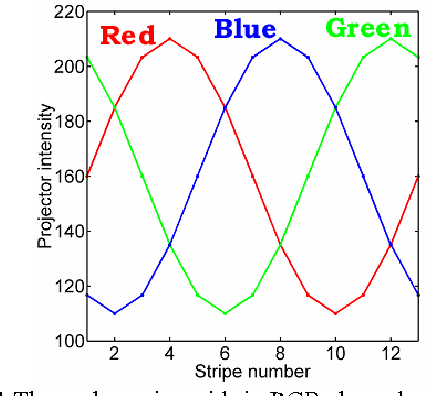
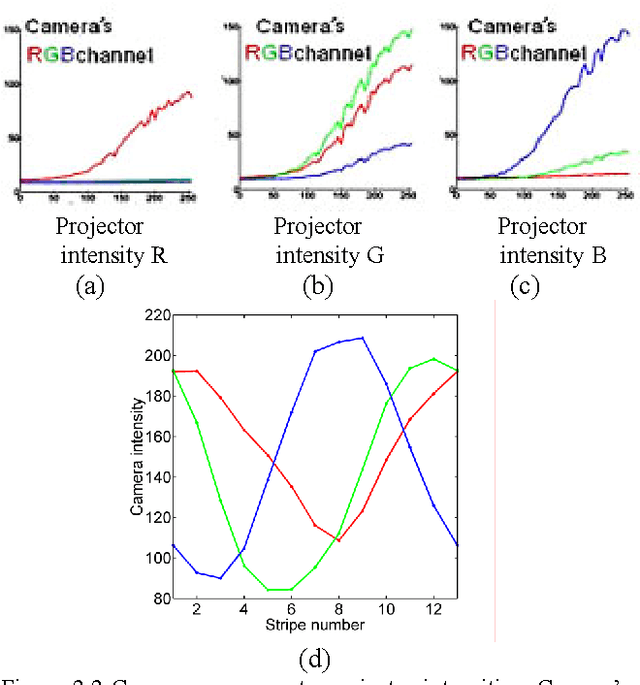
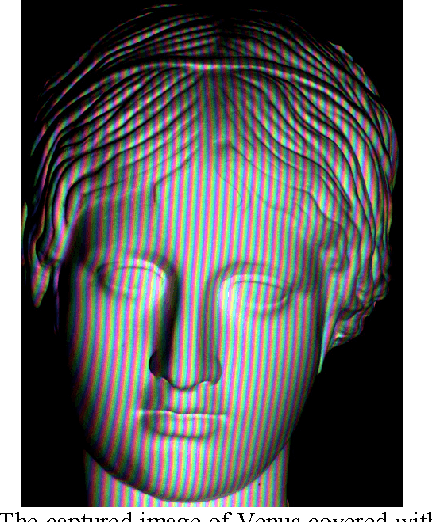
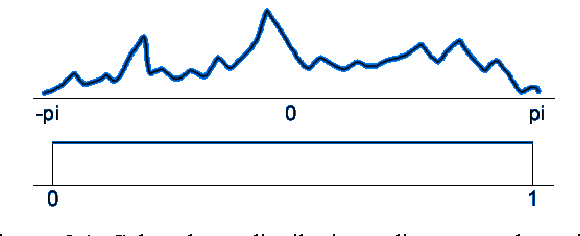
Active range sensing using structured-light is the most accurate and reliable method for obtaining 3D information. However, most of the work has been limited to range sensing of static objects, and range sensing of dynamic (moving or deforming) objects has been investigated recently only by a few researchers. Sinusoidal structured-light is one of the well-known optical methods for 3D measurement. In this paper, we present a novel method for rapid high-resolution range imaging using color sinusoidal pattern. We consider the real-world problem of nonlinearity and color-band crosstalk in the color light projector and color camera, and present methods for accurate recovery of color-phase. For high-resolution ranging, we use high-frequency patterns and describe new unwrapping algorithms for reliable range recovery. The experimental results demonstrate the effectiveness of our methods.
* 6 pages, 12 figures. 6th Asian Conference on Computer Vision (ACCV 2004)
Multi-Projector Color Structured-Light Vision
Aug 31, 2015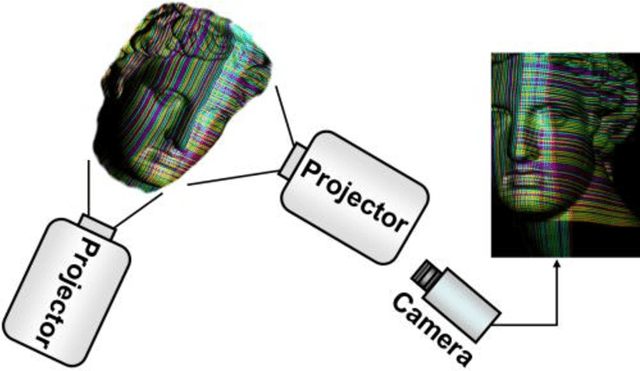
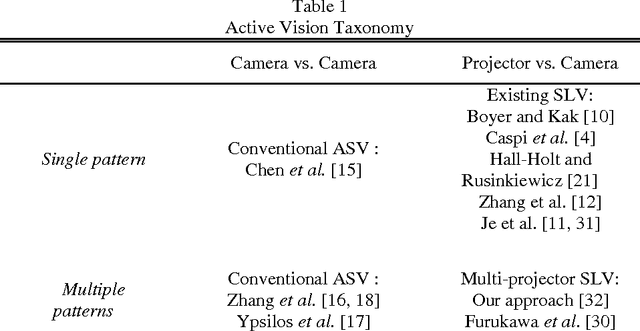
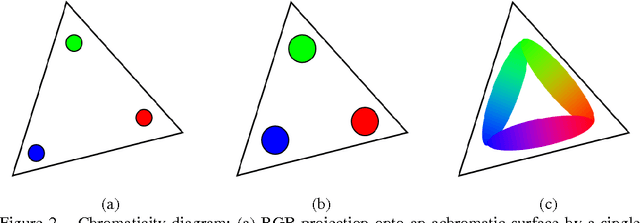
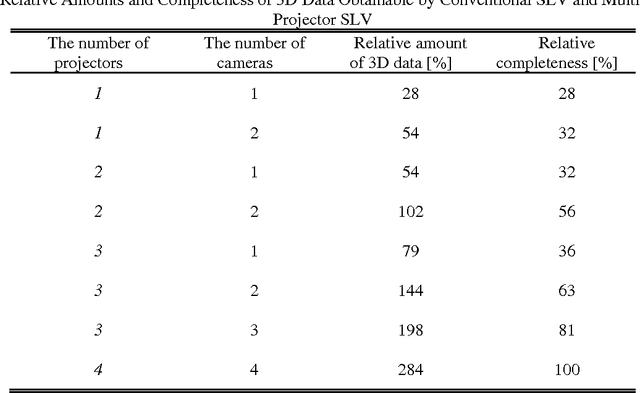
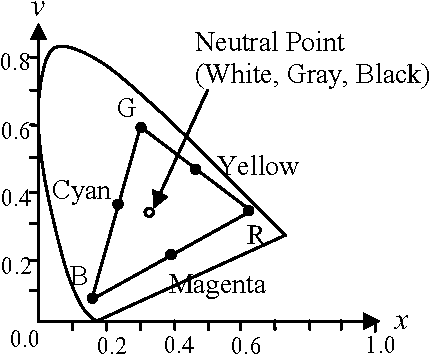
Research interest in rapid structured-light imaging has grown increasingly for the modeling of moving objects, and a number of methods have been suggested for the range capture in a single video frame. The imaging area of a 3D object using a single projector is restricted since the structured light is projected only onto a limited area of the object surface. Employing additional projectors to broaden the imaging area is a challenging problem since simultaneous projection of multiple patterns results in their superposition in the light-intersected areas and the recognition of original patterns is by no means trivial. This paper presents a novel method of multi-projector color structured-light vision based on projector-camera triangulation. By analyzing the behavior of superposed-light colors in a chromaticity domain, we show that the original light colors cannot be properly extracted by the conventional direct estimation. We disambiguate multiple projectors by multiplexing the orientations of projector patterns so that the superposed patterns can be separated by explicit derivative computations. Experimental studies are carried out to demonstrate the validity of the presented method. The proposed method increases the efficiency of range acquisition compared to conventional active stereo using multiple projectors.
* 25 pages, 13 figures
High-Contrast Color-Stripe Pattern for Rapid Structured-Light Range Imaging
Aug 20, 2015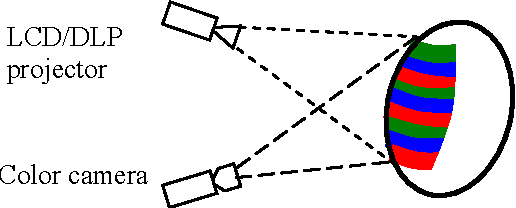
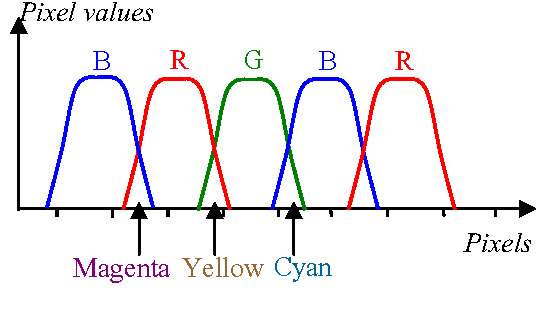
For structured-light range imaging, color stripes can be used for increasing the number of distinguishable light patterns compared to binary BW stripes. Therefore, an appropriate use of color patterns can reduce the number of light projections and range imaging is achievable in single video frame or in "one shot". On the other hand, the reliability and range resolution attainable from color stripes is generally lower than those from multiply projected binary BW patterns since color contrast is affected by object color reflectance and ambient light. This paper presents new methods for selecting stripe colors and designing multiple-stripe patterns for "one-shot" and "two-shot" imaging. We show that maximizing color contrast between the stripes in one-shot imaging reduces the ambiguities resulting from colored object surfaces and limitations in sensor/projector resolution. Two-shot imaging adds an extra video frame and maximizes the color contrast between the first and second video frames to diminish the ambiguities even further. Experimental results demonstrate the effectiveness of the presented one-shot and two-shot color-stripe imaging schemes.
* 13 pages, 12 figures, 8th European Conference on Computer Vision (ECCV), Prague, Czech Republic, May 2004, Proceedings, Part I