 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActiveNeRF: Learning Accurate 3D Geometry by Active Pattern Projection
Aug 13, 2024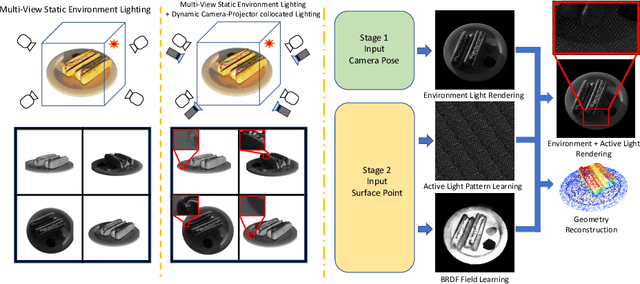

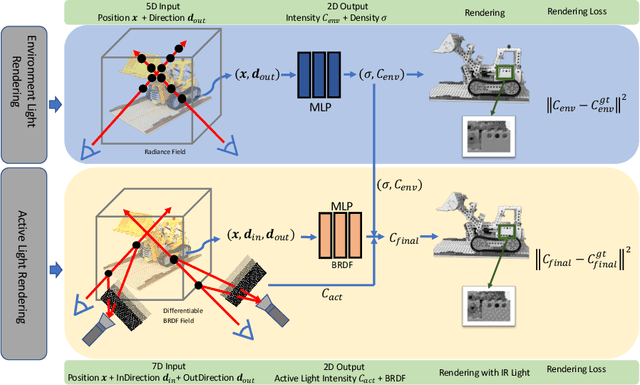

NeRFs have achieved incredible success in novel view synthesis. However, the accuracy of the implicit geometry is unsatisfactory because the passive static environmental illumination has low spatial frequency and cannot provide enough information for accurate geometry reconstruction. In this work, we propose ActiveNeRF, a 3D geometry reconstruction framework, which improves the geometry quality of NeRF by actively projecting patterns of high spatial frequency onto the scene using a projector which has a constant relative pose to the camera. We design a learnable active pattern rendering pipeline which jointly learns the scene geometry and the active pattern. We find that, by adding the active pattern and imposing its consistency across different views, our proposed method outperforms state of the art geometry reconstruction methods qualitatively and quantitatively in both simulation and real experiments. Code is avaliable at https://github.com/hcp16/active_nerf
Stabilizing DARTS with Amended Gradient Estimation on Architectural Parameters
Nov 11, 2019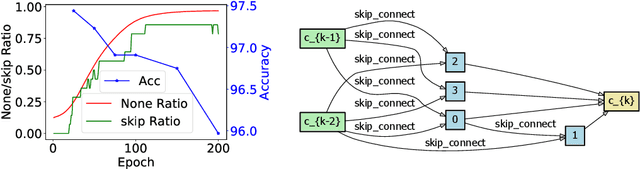



Differentiable neural architecture search has been a popular methodology of exploring architectures for deep learning. Despite the great advantage of search efficiency, it often suffers weak stability, which obstacles it from being applied to a large search space or being flexibly adjusted to different scenarios. This paper investigates DARTS, the currently most popular differentiable search algorithm, and points out an important factor of instability, which lies in its approximation on the gradients of architectural parameters. In the current status, the optimization algorithm can converge to another point which results in dramatic inaccuracy in the re-training process. Based on this analysis, we propose an amending term for computing architectural gradients by making use of a direct property of the optimality of network parameter optimization. Our approach mathematically guarantees that gradient estimation follows a roughly correct direction, which leads the search stage to converge on reasonable architectures. In practice, our algorithm is easily implemented and added to DARTS-based approaches efficiently. Experiments on CIFAR and ImageNet demonstrate that our approach enjoys accuracy gain and, more importantly, enables DARTS-based approaches to explore much larger search spaces that have not been studied before.