 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequence-to-Sequence Prediction of Vehicle Trajectory via LSTM Encoder-Decoder Architecture
Oct 22, 2018

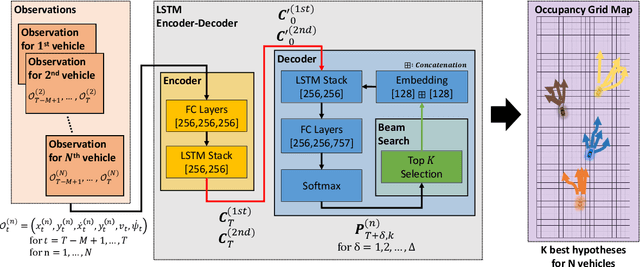

In this paper, we propose a deep learning based vehicle trajectory prediction technique which can generate the future trajectory sequence of surrounding vehicles in real time. We employ the encoder-decoder architecture which analyzes the pattern underlying in the past trajectory using the long short-term memory (LSTM) based encoder and generates the future trajectory sequence using the LSTM based decoder. This structure produces the $K$ most likely trajectory candidates over occupancy grid map by employing the beam search technique which keeps the $K$ locally best candidates from the decoder output. The experiments conducted on highway traffic scenarios show that the prediction accuracy of the proposed method is significantly higher than the conventional trajectory prediction techniques.
Probabilistic Vehicle Trajectory Prediction over Occupancy Grid Map via Recurrent Neural Network
Sep 01, 2017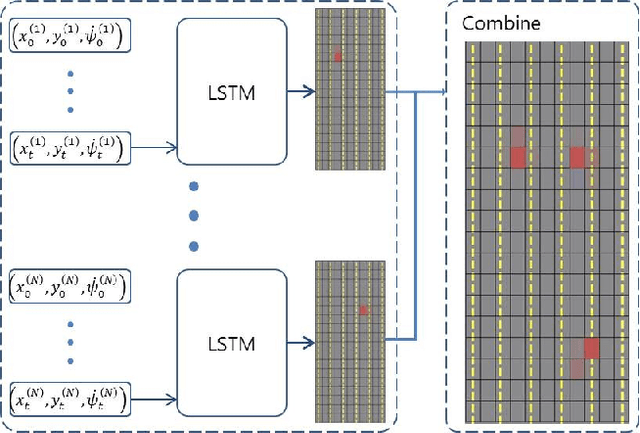


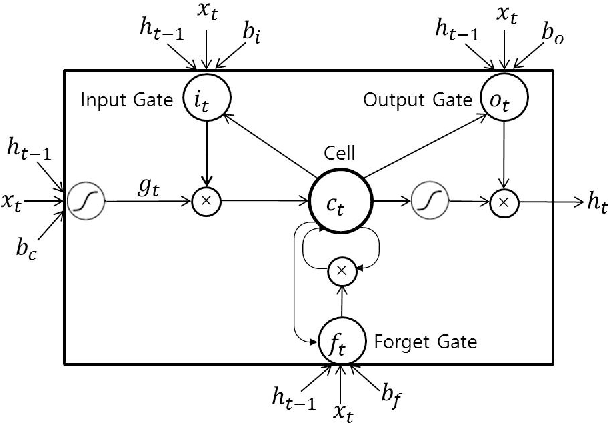
In this paper, we propose an efficient vehicle trajectory prediction framework based on recurrent neural network. Basically, the characteristic of the vehicle's trajectory is different from that of regular moving objects since it is affected by various latent factors including road structure, traffic rules, and driver's intention. Previous state of the art approaches use sophisticated vehicle behavior model describing these factors and derive the complex trajectory prediction algorithm, which requires a system designer to conduct intensive model optimization for practical use. Our approach is data-driven and simple to use in that it learns complex behavior of the vehicles from the massive amount of trajectory data through deep neural network model. The proposed trajectory prediction method employs the recurrent neural network called long short-term memory (LSTM) to analyze the temporal behavior and predict the future coordinate of the surrounding vehicles. The proposed scheme feeds the sequence of vehicles' coordinates obtained from sensor measurements to the LSTM and produces the probabilistic information on the future location of the vehicles over occupancy grid map. The experiments conducted using the data collected from highway driving show that the proposed method can produce reasonably good estimate of future trajectory.
Autonomous Braking System via Deep Reinforcement Learning
Apr 24, 2017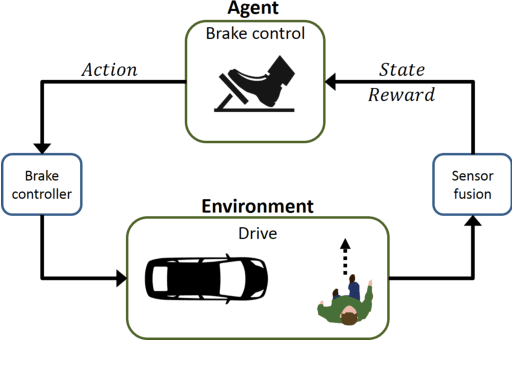
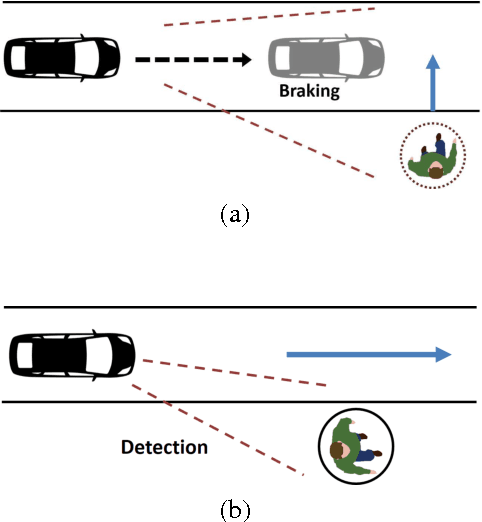
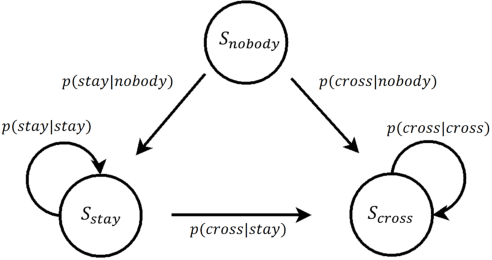
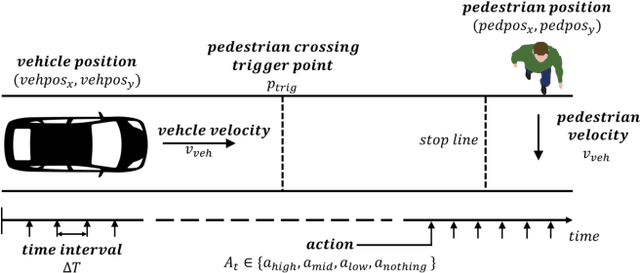
In this paper, we propose a new autonomous braking system based on deep reinforcement learning. The proposed autonomous braking system automatically decides whether to apply the brake at each time step when confronting the risk of collision using the information on the obstacle obtained by the sensors. The problem of designing brake control is formulated as searching for the optimal policy in Markov decision process (MDP) model where the state is given by the relative position of the obstacle and the vehicle's speed, and the action space is defined as whether brake is stepped or not. The policy used for brake control is learned through computer simulations using the deep reinforcement learning method called deep Q-network (DQN). In order to derive desirable braking policy, we propose the reward function which balances the damage imposed to the obstacle in case of accident and the reward achieved when the vehicle runs out of risk as soon as possible. DQN is trained for the scenario where a vehicle is encountered with a pedestrian crossing the urban road. Experiments show that the control agent exhibits desirable control behavior and avoids collision without any mistake in various uncertain environments.