 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Braking System via Deep Reinforcement Learning
Paper and Code
Apr 24, 2017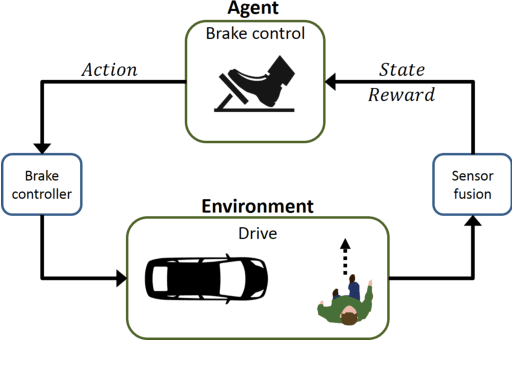
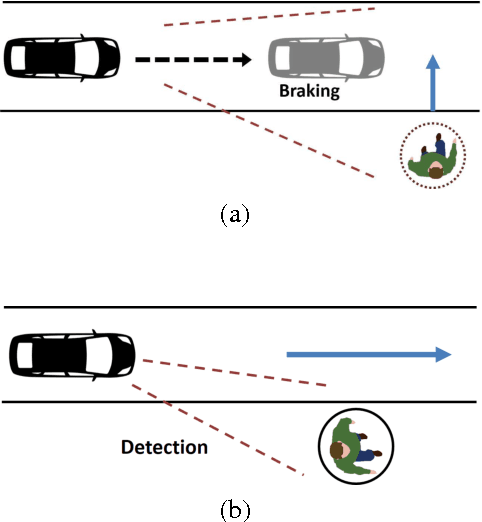
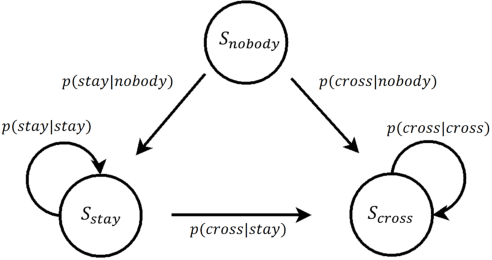
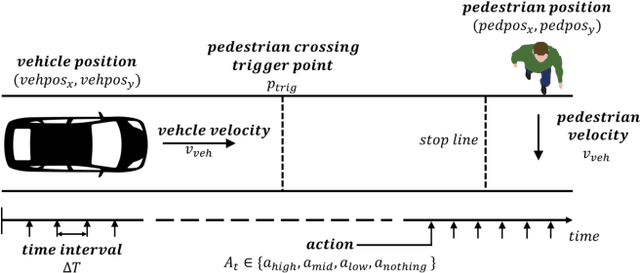
In this paper, we propose a new autonomous braking system based on deep reinforcement learning. The proposed autonomous braking system automatically decides whether to apply the brake at each time step when confronting the risk of collision using the information on the obstacle obtained by the sensors. The problem of designing brake control is formulated as searching for the optimal policy in Markov decision process (MDP) model where the state is given by the relative position of the obstacle and the vehicle's speed, and the action space is defined as whether brake is stepped or not. The policy used for brake control is learned through computer simulations using the deep reinforcement learning method called deep Q-network (DQN). In order to derive desirable braking policy, we propose the reward function which balances the damage imposed to the obstacle in case of accident and the reward achieved when the vehicle runs out of risk as soon as possible. DQN is trained for the scenario where a vehicle is encountered with a pedestrian crossing the urban road. Experiments show that the control agent exhibits desirable control behavior and avoids collision without any mistake in various uncertain environments.