 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Discounting of Training Time Attacks
Jan 05, 2024



Among the most insidious attacks on Reinforcement Learning (RL) solutions are training-time attacks (TTAs) that create loopholes and backdoors in the learned behaviour. Not limited to a simple disruption, constructive TTAs (C-TTAs) are now available, where the attacker forces a specific, target behaviour upon a training RL agent (victim). However, even state-of-the-art C-TTAs focus on target behaviours that could be naturally adopted by the victim if not for a particular feature of the environment dynamics, which C-TTAs exploit. In this work, we show that a C-TTA is possible even when the target behaviour is un-adoptable due to both environment dynamics as well as non-optimality with respect to the victim objective(s). To find efficient attacks in this context, we develop a specialised flavour of the DDPG algorithm, which we term gammaDDPG, that learns this stronger version of C-TTA. gammaDDPG dynamically alters the attack policy planning horizon based on the victim's current behaviour. This improves effort distribution throughout the attack timeline and reduces the effect of uncertainty the attacker has about the victim. To demonstrate the features of our method and better relate the results to prior research, we borrow a 3D grid domain from a state-of-the-art C-TTA for our experiments. Code is available at "bit.ly/github-rb-gDDPG".
VDPC: Variational Density Peak Clustering Algorithm
Dec 29, 2021
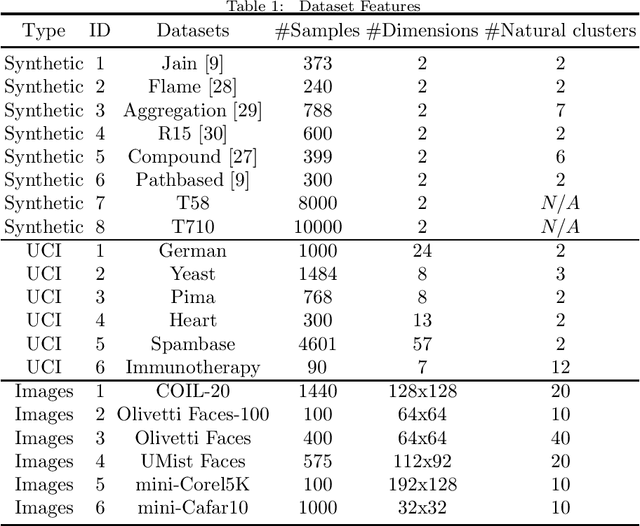
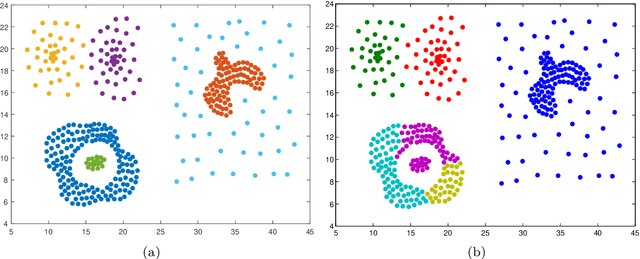

The widely applied density peak clustering (DPC) algorithm makes an intuitive cluster formation assumption that cluster centers are often surrounded by data points with lower local density and far away from other data points with higher local density. However, this assumption suffers from one limitation that it is often problematic when identifying clusters with lower density because they might be easily merged into other clusters with higher density. As a result, DPC may not be able to identify clusters with variational density. To address this issue, we propose a variational density peak clustering (VDPC) algorithm, which is designed to systematically and autonomously perform the clustering task on datasets with various types of density distributions. Specifically, we first propose a novel method to identify the representatives among all data points and construct initial clusters based on the identified representatives for further analysis of the clusters' property. Furthermore, we divide all data points into different levels according to their local density and propose a unified clustering framework by combining the advantages of both DPC and DBSCAN. Thus, all the identified initial clusters spreading across different density levels are systematically processed to form the final clusters. To evaluate the effectiveness of the proposed VDPC algorithm, we conduct extensive experiments using 20 datasets including eight synthetic, six real-world and six image datasets. The experimental results show that VDPC outperforms two classical algorithms (i.e., DPC and DBSCAN) and four state-of-the-art extended DPC algorithms.
Are object detection assessment criteria ready for maritime computer vision?
Sep 12, 2018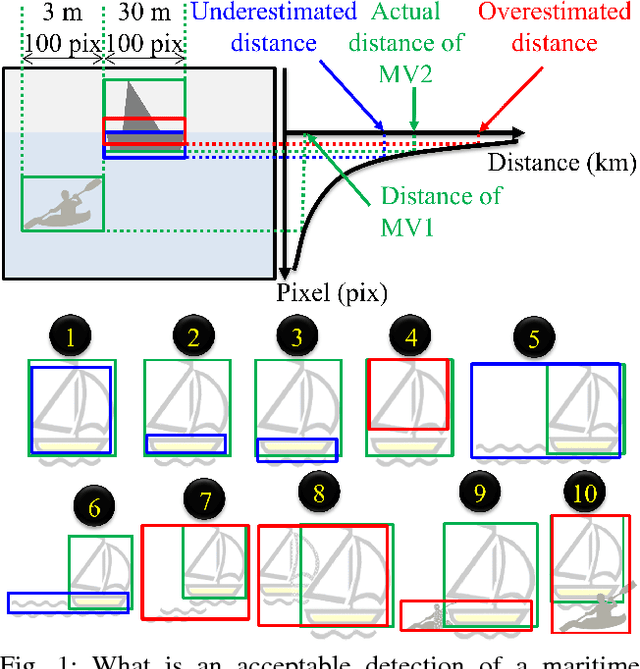
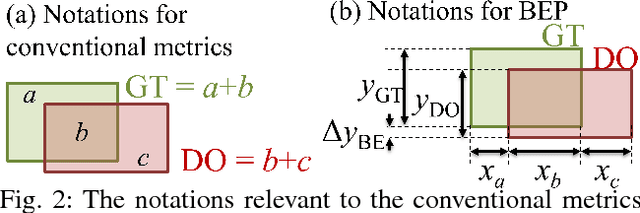
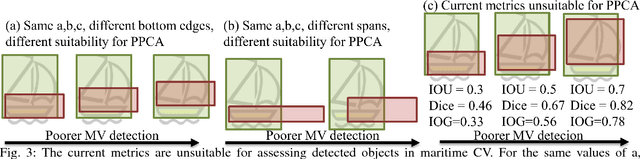
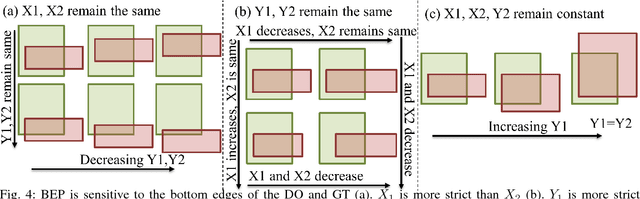
Maritime vessels equipped with visible and infrared cameras can complement other conventional sensors for object detection. However, application of computer vision techniques in maritime domain received attention only recently. Maritime environment offers its own unique requirements and challenges. Assessment of quality of detections is a fundamental need in computer vision. However, the conventional assessment metrics suitable for usual object detection are deficient in maritime setting. Thus, a large body of related work in computer vision appears inapplicable to maritime setting at the first sight. We discuss the problem of defining assessment metrics suitable for maritime computer vision. We consider new bottom edge proximity metrics as assessment metrics for maritime computer vision. These metrics indicate that existing computer vision approaches are indeed promising for maritime computer vision and can play a foundational role in the emerging field of maritime computer vision.