 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA State-of-the-art Survey on Full-duplex Network Design
Feb 08, 2024


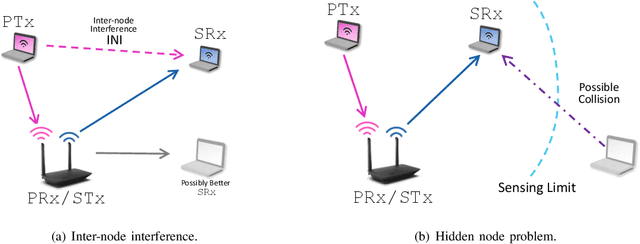
Full-duplex (FD) technology is gaining popularity for integration into a wide range of wireless networks due to its demonstrated potential in recent studies. In contrast to half-duplex (HD) technology, the implementation of FD in networks necessitates considering inter-node interference (INI) from various network perspectives. When deploying FD technology in networks, several critical factors must be taken into account. These include self-interference (SI) and the requisite SI cancellation (SIC) processes, as well as the selection of multiple user equipment (UE) per time slot. Additionally, inter-node interference (INI), including cross-link interference (CLI) and inter-cell interference (ICI), become crucial issues during concurrent uplink (UL) and downlink (DL) transmission and reception, similar to SI. Since most INI is challenging to eliminate, a comprehensive investigation that covers radio resource control (RRC), medium access control (MAC), and the physical layer (PHY) is essential in the context of FD network design, rather than focusing on individual network layers and types. This paper covers state-of-the-art studies, including protocols and documents from 3GPP for FD, MAC protocol, user scheduling, and CLI handling. The methods are also compared through a network-level system simulation based on 3D ray-tracing.
AoA-based Position and Orientation Estimation Using Lens MIMO in Cooperative Vehicle-to-Vehicle Systems
Jun 29, 2023



Positioning accuracy is a critical requirement for vehicle-to-everything (V2X) use cases. Therefore, this paper derives the theoretical limits of estimation for the position and orientation of vehicles in a cooperative vehicle-to-vehicle (V2V) scenario, using a lens-based multiple-input multiple-output (lens-MIMO) system. Following this, we analyze the Cram$\acute{\text{e}}$r-Rao lower bounds (CRLBs) of the position and orientation estimation and explore a received signal model of a lens-MIMO for the particular angle of arrival (AoA) estimation with a V2V geometric model. Further, we propose a lower complexity AoA estimation technique exploiting the unique characteristics of the lens-MIMO for a single target vehicle; as a result, its estimation scheme is effectively extended by the successive interference cancellation (SIC) method for multiple target vehicles. Given these AoAs, we investigate the lens-MIMO estimation capability for the positions and orientations of vehicles. Subsequently, we prove that the lens-MIMO outperforms a conventional uniform linear array (ULA) in a certain configuration of a lens's structure. Finally, we confirm that the proposed localization algorithm is superior to ULA's CRLB as the resolution of the lens increases in spite of the lower complexity.