 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Planning for Cooperative Localization: A Fisher Information Approach
Dec 30, 2022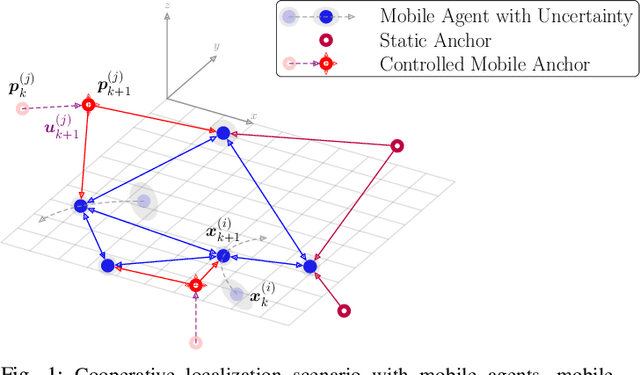
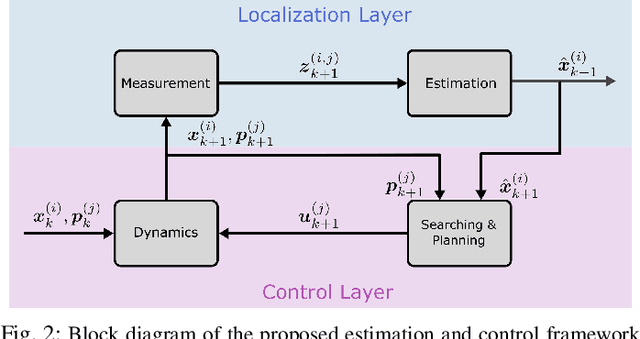
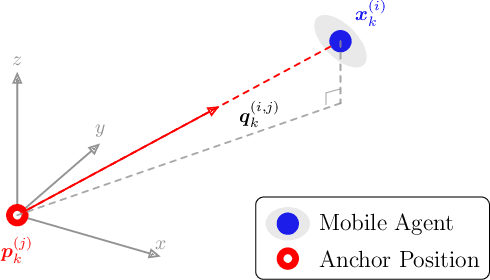
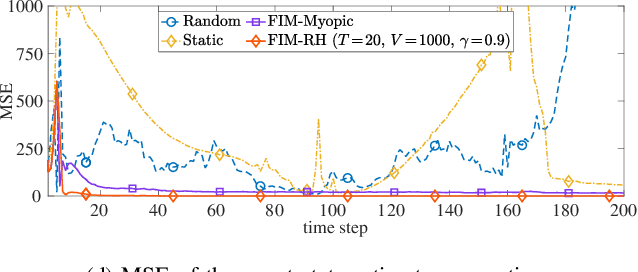
Location-aware networks will introduce new services and applications for modern convenience, surveillance, and public safety. In this paper, we consider the problem of cooperative localization in a wireless network where the position of certain anchor nodes can be controlled. We introduce an active planning method that aims at moving the anchors such that the information gain of future measurements is maximized. In the control layer of the proposed method, control inputs are calculated by minimizing the traces of approximate inverse Bayesian Fisher information matrixes (FIMs). The estimation layer computes estimates of the agent states and provides Gaussian representations of marginal posteriors of agent positions to the control layer for approximate Bayesian FIM computations. Based on a cost function that accumulates Bayesian FIM contributions over a sliding window of discrete future timesteps, a receding horizon (RH) control is performed. Approximations that make it possible to solve the resulting tree-search problem efficiently are also discussed. A numerical case study demonstrates the intelligent behavior of a single controlled anchor in a 3-D scenario and the resulting significantly improved localization accuracy.
Data Fusion for Multipath-Based SLAM: Combing Information from Multiple Propagation Paths
Nov 24, 2022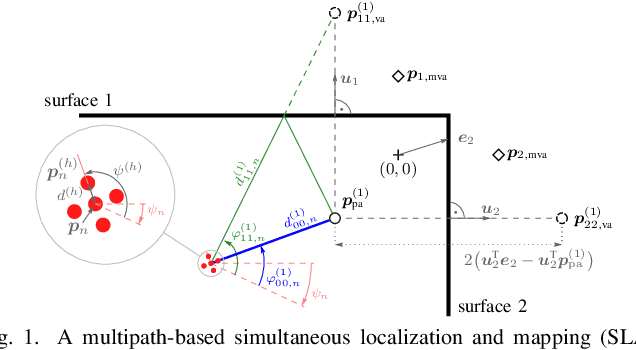
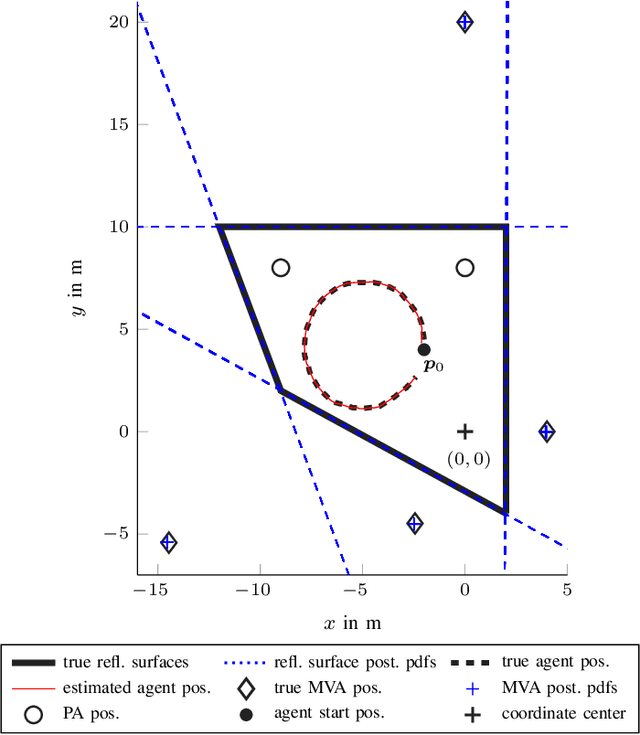
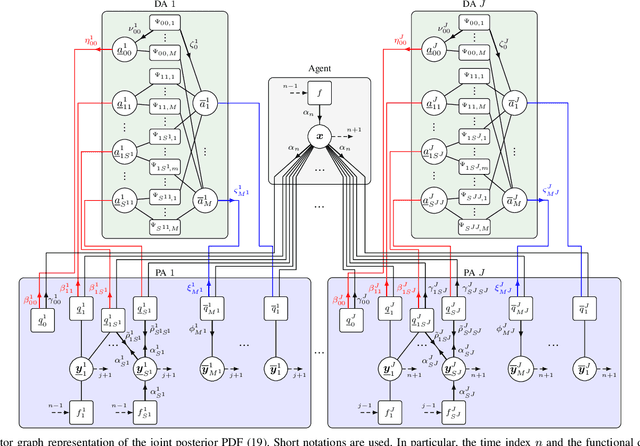
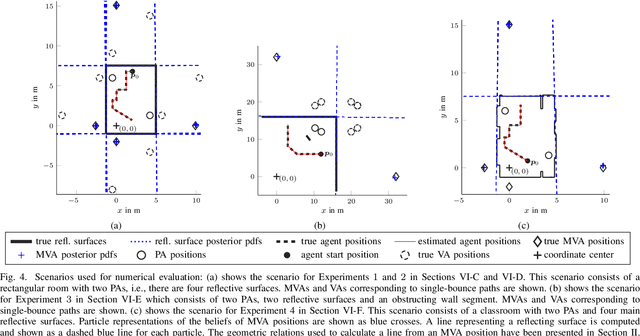
Multipath-based simultaneous localization and mapping (SLAM) is an emerging paradigm for accurate indoor localization with limited resources. The goal of multipath-based SLAM is to detect and localize radio reflective surfaces to support the estimation of time-varying positions of mobile agents. Radio reflective surfaces are typically represented by so-called virtual anchors (VAs), which are mirror images of base stations at the surfaces. In existing multipath-based SLAM methods, a VA is introduced for each propagation path, even if the goal is to map the reflective surfaces. The fact that not every reflective surface but every propagation path is modeled by a VA, complicates a consistent combination "fusion" of statistical information across multiple paths and base stations and thus limits the accuracy and mapping speed of existing multipath-based SLAM methods. In this paper, we introduce an improved statistical model and estimation method that enables data fusion for multipath-based SLAM by representing each surface by a single master virtual anchor (MVA). We further develop a particle-based sum-product algorithm (SPA) that performs probabilistic data association to compute marginal posterior distributions of MVA and agent positions efficiently. A key aspect of the proposed estimation method based on MVAs is to check the availability of single-bounce and double-bounce propagation paths at a specific agent position by means of ray-launching. The availability check is directly integrated into the statistical model by providing detection probabilities for probabilistic data association. Our numerical simulation results demonstrate significant improvements in estimation accuracy and mapping speed compared to state-of-the-art multipath-based SLAM methods.
Data Fusion for Radio Frequency SLAM with Robust Sampling
Jun 20, 2022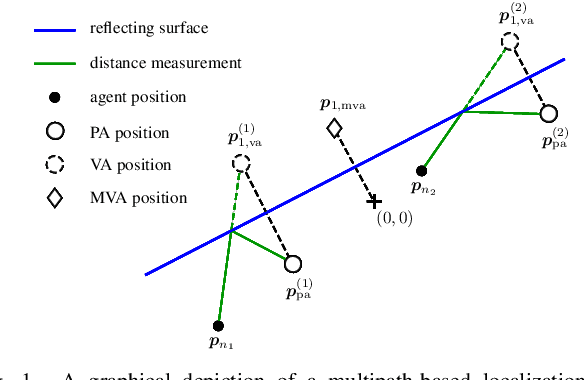
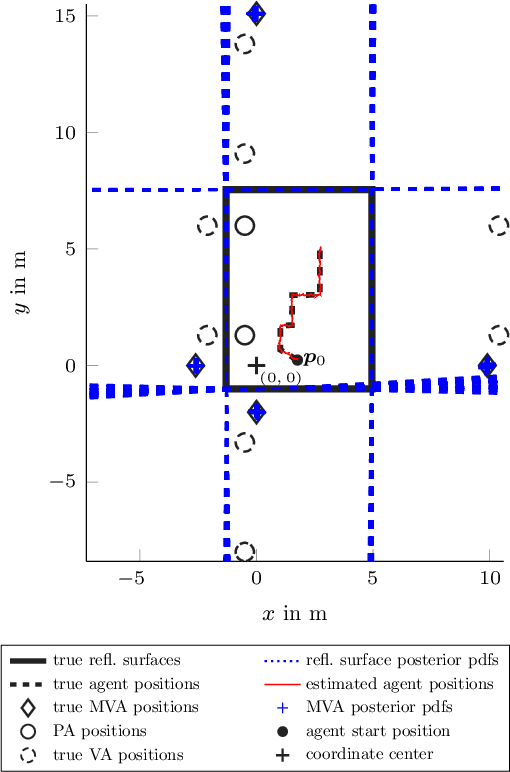
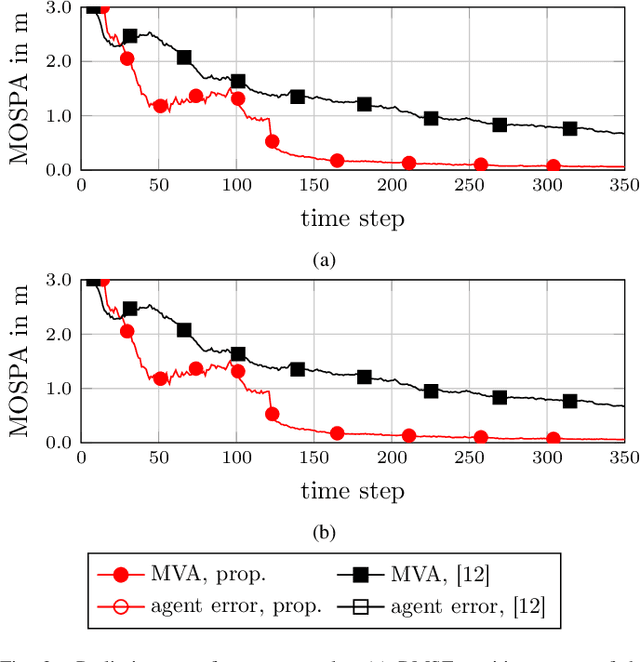
Precise indoor localization remains a challenging problem for a variety of essential applications. A promising approach to address this problem is to exchange radio signals between mobile agents and static physical anchors (PAs) that bounce off flat surfaces in the indoor environment. Radio frequency simultaneous localization and mapping (RF-SLAM) methods can be used to jointly estimates the time-varying location of agents as well as the static locations of the flat surfaces. Recent work on RF-SLAM methods has shown that each surface can be efficiently represented by a single master virtual anchor (MVA). The measurement model related to this MVA-based RF-SLAM method is highly nonlinear. Thus, Bayesian estimation relies on sampling-based techniques. The original MVA-based RF-SLAM method employs conventional "bootstrap" sampling. In challenging scenarios it was observed that the original method might converge to incorrect MVA positions corresponding to local maxima. In this paper, we introduce MVA-based RF-SLAM with an improved sampling technique that succeeds in the aforementioned challenging scenarios. Our simulation results demonstrate significant performance advantages.