 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Fusion for Radio Frequency SLAM with Robust Sampling
Paper and Code
Jun 20, 2022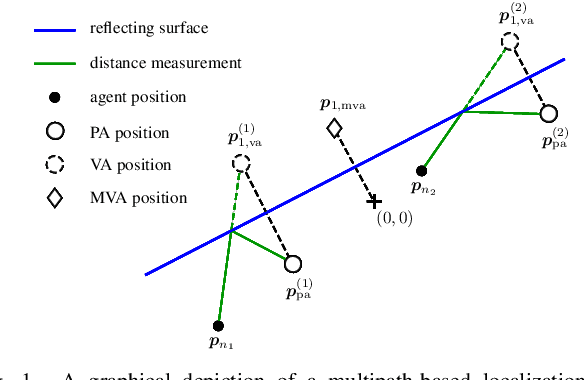
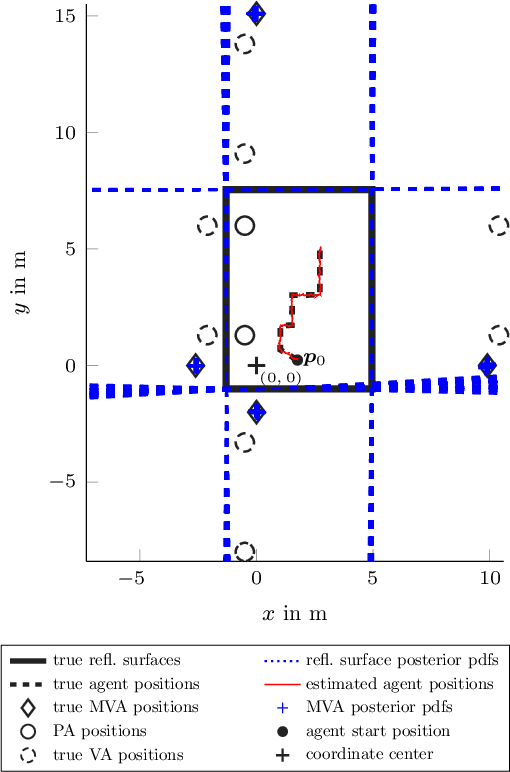
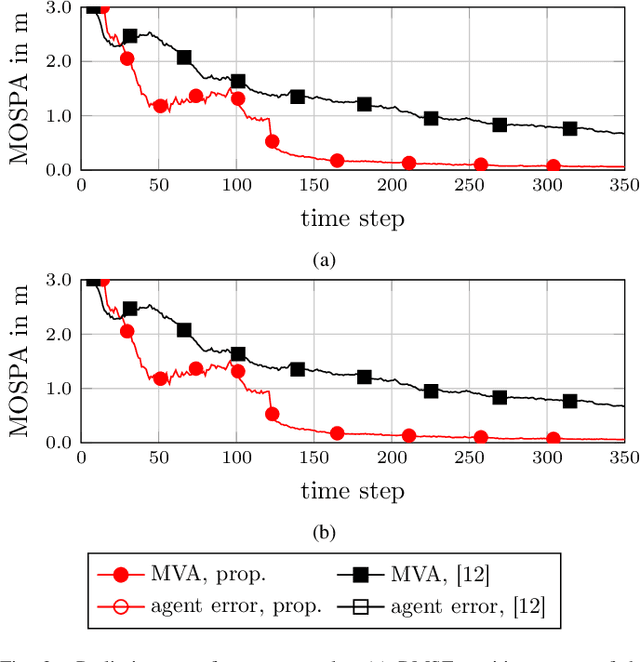
Precise indoor localization remains a challenging problem for a variety of essential applications. A promising approach to address this problem is to exchange radio signals between mobile agents and static physical anchors (PAs) that bounce off flat surfaces in the indoor environment. Radio frequency simultaneous localization and mapping (RF-SLAM) methods can be used to jointly estimates the time-varying location of agents as well as the static locations of the flat surfaces. Recent work on RF-SLAM methods has shown that each surface can be efficiently represented by a single master virtual anchor (MVA). The measurement model related to this MVA-based RF-SLAM method is highly nonlinear. Thus, Bayesian estimation relies on sampling-based techniques. The original MVA-based RF-SLAM method employs conventional "bootstrap" sampling. In challenging scenarios it was observed that the original method might converge to incorrect MVA positions corresponding to local maxima. In this paper, we introduce MVA-based RF-SLAM with an improved sampling technique that succeeds in the aforementioned challenging scenarios. Our simulation results demonstrate significant performance advantages.