 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI in Insurance: Adaptive Questionnaires for Improved Risk Profiling
Apr 02, 2026Insurance application processes often rely on lengthy and standardized questionnaires that struggle to capture individual differences. Moreover, insurers must blindly trust users' responses, increasing the chances of fraud. The ARQuest framework introduces a new approach to underwriting by using Large Language Models (LLMs) and alternative data sources to create personalized and adaptive questionnaires. Techniques such as social media image analysis, geographic data categorization, and Retrieval Augmented Generation (RAG) are used to extract meaningful user insights and guide targeted follow-up questions. A life insurance system integrated into an industry partner mobile app was tested in two experiments. While traditional questionnaires yielded slightly higher accuracy in risk assessment, adaptive versions powered by GPT models required fewer questions and were preferred by users for their more fluid and engaging experience. ARQuest shows great potential to improve user satisfaction and streamline insurance processes. With further development, this approach may exceed traditional methods regarding risk accuracy and help drive innovation in the insurance industry.
User-oriented Natural Human-Robot Control with Thin-Plate Splines and LRCN
May 24, 2021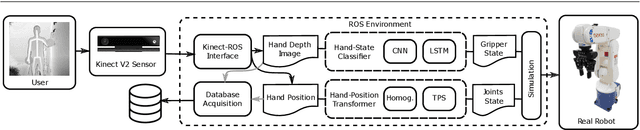
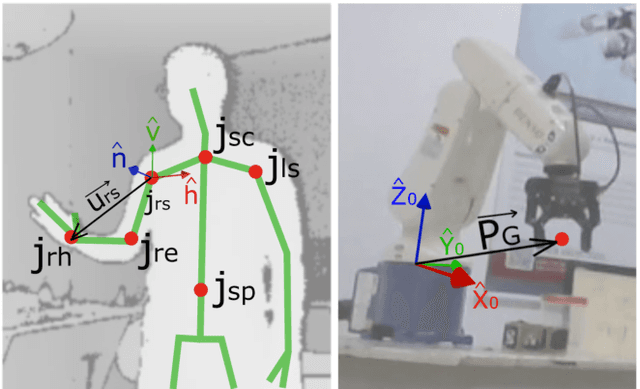
We propose a real-time vision-based teleoperation approach for robotic arms that employs a single depth-based camera, exempting the user from the need for any wearable devices. By employing a natural user interface, this novel approach leverages the conventional fine-tuning control, turning it into a direct body pose capture process. The proposed approach is comprised of two main parts. The first is a nonlinear customizable pose mapping based on Thin-Plate Splines (TPS), to directly transfer human body motion to robotic arm motion in a nonlinear fashion, thus allowing matching dissimilar bodies with different workspace shapes and kinematic constraints. The second is a Deep Neural Network hand-state classifier based on Long-term Recurrent Convolutional Networks (LRCN) that exploits the temporal coherence of the acquired depth data. We validate, evaluate and compare our approach through both classical cross-validation experiments of the proposed hand state classifier; and user studies over a set of practical experiments involving variants of pick-and-place and manufacturing tasks. Results revealed that LRCN networks outperform single image Convolutional Neural Networks; and that users' learning curves were steep, thus allowing the successful completion of the proposed tasks. When compared to a previous approach, the TPS approach revealed no increase in task complexity and similar times of completion, while providing more precise operation in regions closer to workspace boundaries.
Predicting Account Receivables with Machine Learning
Aug 11, 2020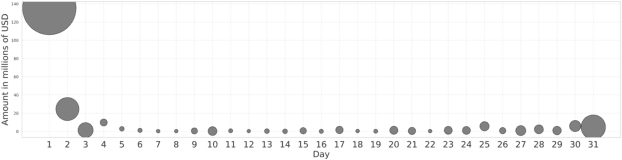
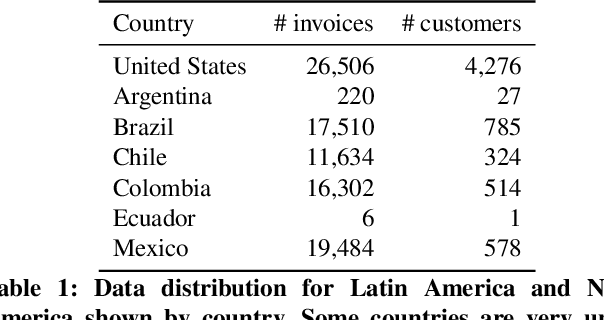

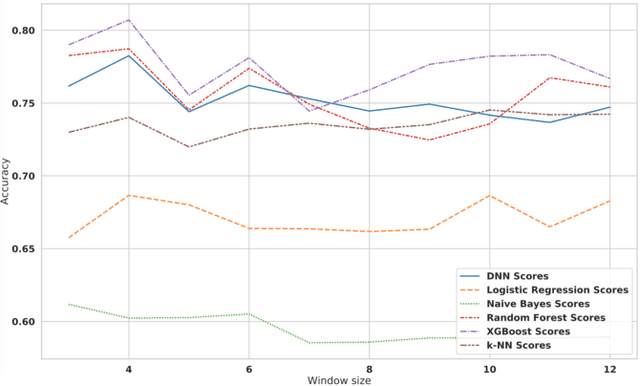
Being able to predict when invoices will be paid is valuable in multiple industries and supports decision-making processes in most financial workflows. However, due to the complexity of data related to invoices and the fact that the decision-making process is not registered in the accounts receivable system, performing this prediction becomes a challenge. In this paper, we present a prototype able to support collectors in predicting the payment of invoices. This prototype is part of a solution developed in partnership with a multinational bank and it has reached up to 81% of prediction accuracy, which improved the prioritization of customers and supported the daily work of collectors. Our simulations show that the adoption of our model to prioritize the work o collectors saves up to ~1.75 million dollars per month. The methodology and results presented in this paper will allow researchers and practitioners in dealing with the problem of invoice payment prediction, providing insights and examples of how to tackle issues present in real data.
Optimize Cash Collection: Use Machine learning to Predicting Invoice Payment
Dec 20, 2019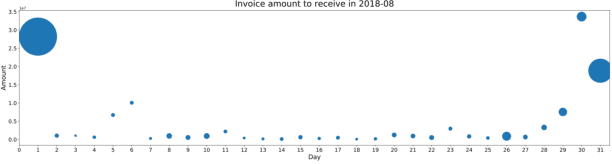
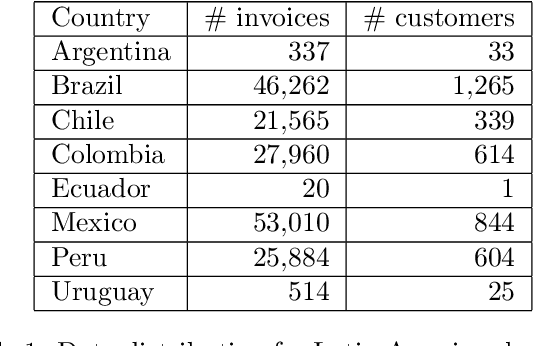
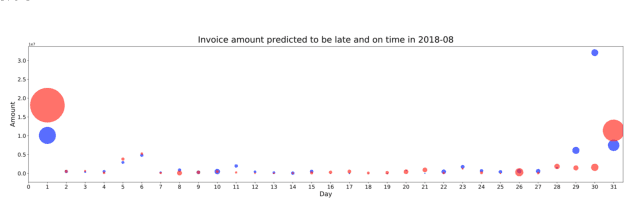
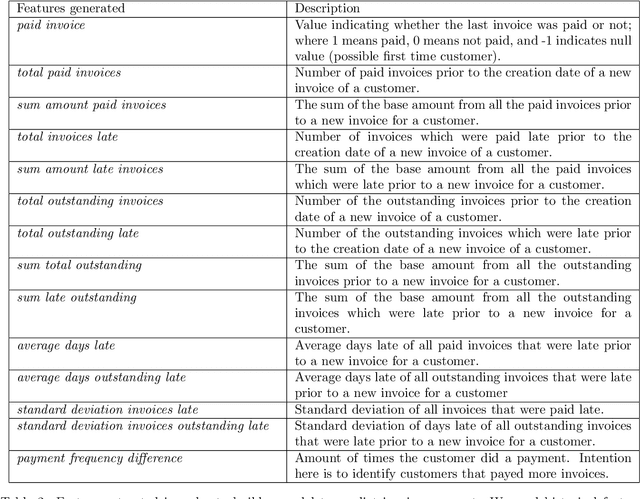
Predicting invoice payment is valuable in multiple industries and supports decision-making processes in most financial workflows. However, the challenge in this realm involves dealing with complex data and the lack of data related to decisions-making processes not registered in the accounts receivable system. This work presents a prototype developed as a solution devised during a partnership with a multinational bank to support collectors in predicting invoices payment. The proposed prototype reached up to 77\% of accuracy, which improved the prioritization of customers and supported the daily work of collectors. With the presented results, one expects to support researchers dealing with the problem of invoice payment prediction to get insights and examples of how to tackle issues present in real data.