 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Design of Telecom Networks with Genetic Algorithms
Apr 02, 2023With the increasing demand for high-quality internet services, deploying GPON/Fiber-to-the-Home networks is one of the biggest challenges that internet providers have to deal with due to the significant investments involved. Automated network design usage becomes more critical to aid with planning the network by minimising the costs of planning and deployment. The main objective is to tackle this problem of optimisation of networks that requires taking into account multiple factors such as the equipment placement and their configuration, the optimisation of the cable routes, the optimisation of the clients' allocation and other constraints involved in the minimisation problem. An AI-based solution is proposed to automate network design, which is a task typically done manually by teams of engineers. It is a difficult task requiring significant time to complete manually. To alleviate this tiresome task, we proposed a Genetic Algorithm using a two-level representation to design the networks automatically. To validate the approach, we compare the quality of the generated solutions with the handmade design ones that are deployed in the real world. The results show that our method can save costs and time in finding suitable and better solutions than existing ones, indicating its potential as a support design tool of solutions for GPON/Fiber-to-the-Home networks. In concrete, in the two scenarios where we validate our proposal, our approach can cut costs by 31% and by 52.2%, respectively, when compared with existing handmade ones, showcasing and validating the potential of the proposed approach.
User-oriented Natural Human-Robot Control with Thin-Plate Splines and LRCN
May 24, 2021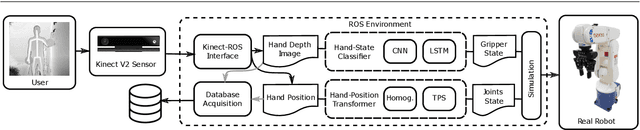
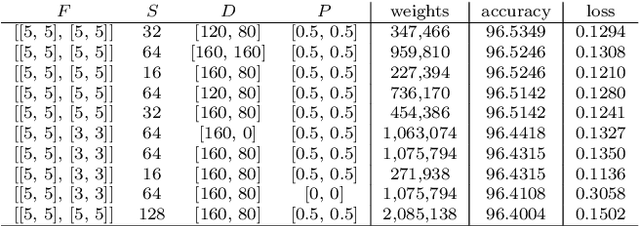
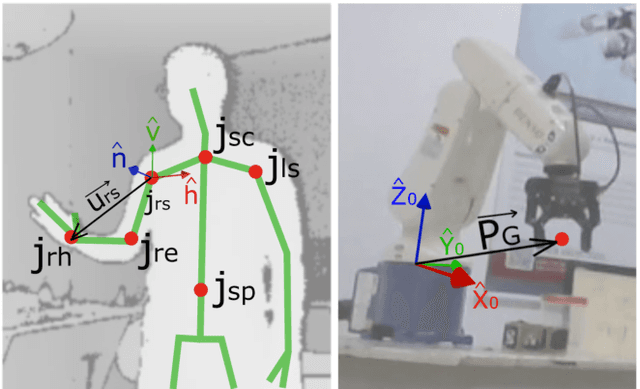
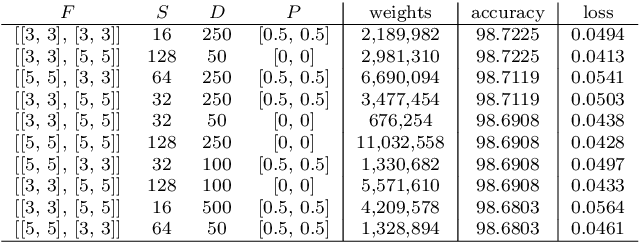
We propose a real-time vision-based teleoperation approach for robotic arms that employs a single depth-based camera, exempting the user from the need for any wearable devices. By employing a natural user interface, this novel approach leverages the conventional fine-tuning control, turning it into a direct body pose capture process. The proposed approach is comprised of two main parts. The first is a nonlinear customizable pose mapping based on Thin-Plate Splines (TPS), to directly transfer human body motion to robotic arm motion in a nonlinear fashion, thus allowing matching dissimilar bodies with different workspace shapes and kinematic constraints. The second is a Deep Neural Network hand-state classifier based on Long-term Recurrent Convolutional Networks (LRCN) that exploits the temporal coherence of the acquired depth data. We validate, evaluate and compare our approach through both classical cross-validation experiments of the proposed hand state classifier; and user studies over a set of practical experiments involving variants of pick-and-place and manufacturing tasks. Results revealed that LRCN networks outperform single image Convolutional Neural Networks; and that users' learning curves were steep, thus allowing the successful completion of the proposed tasks. When compared to a previous approach, the TPS approach revealed no increase in task complexity and similar times of completion, while providing more precise operation in regions closer to workspace boundaries.