 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser-oriented Natural Human-Robot Control with Thin-Plate Splines and LRCN
Paper and Code
May 24, 2021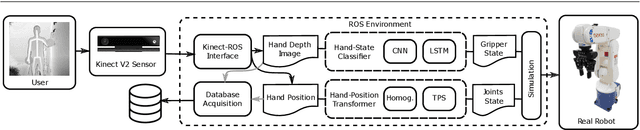
We propose a real-time vision-based teleoperation approach for robotic arms that employs a single depth-based camera, exempting the user from the need for any wearable devices. By employing a natural user interface, this novel approach leverages the conventional fine-tuning control, turning it into a direct body pose capture process. The proposed approach is comprised of two main parts. The first is a nonlinear customizable pose mapping based on Thin-Plate Splines (TPS), to directly transfer human body motion to robotic arm motion in a nonlinear fashion, thus allowing matching dissimilar bodies with different workspace shapes and kinematic constraints. The second is a Deep Neural Network hand-state classifier based on Long-term Recurrent Convolutional Networks (LRCN) that exploits the temporal coherence of the acquired depth data. We validate, evaluate and compare our approach through both classical cross-validation experiments of the proposed hand state classifier; and user studies over a set of practical experiments involving variants of pick-and-place and manufacturing tasks. Results revealed that LRCN networks outperform single image Convolutional Neural Networks; and that users' learning curves were steep, thus allowing the successful completion of the proposed tasks. When compared to a previous approach, the TPS approach revealed no increase in task complexity and similar times of completion, while providing more precise operation in regions closer to workspace boundaries.