 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeeptime: a Python library for machine learning dynamical models from time series data
Oct 28, 2021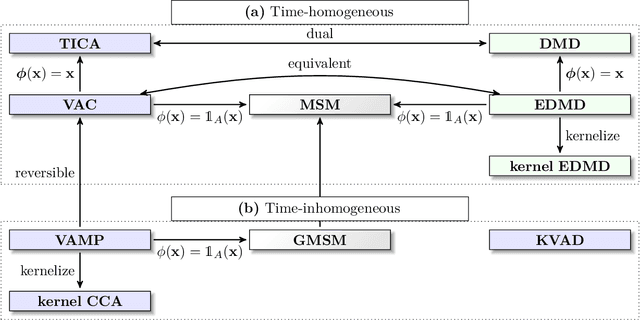

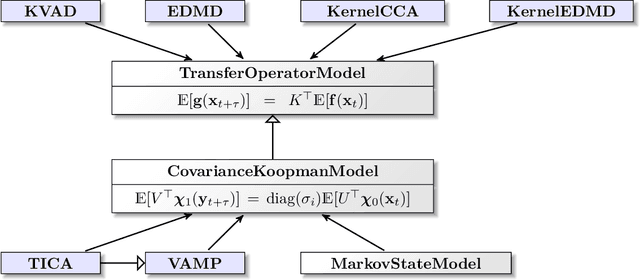
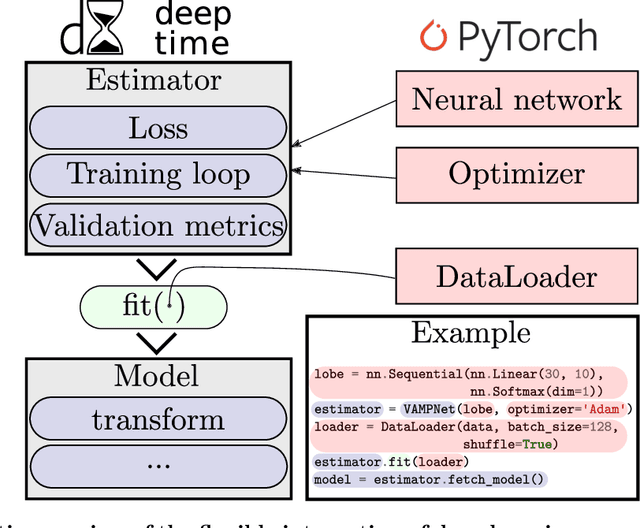
Generation and analysis of time-series data is relevant to many quantitative fields ranging from economics to fluid mechanics. In the physical sciences, structures such as metastable and coherent sets, slow relaxation processes, collective variables dominant transition pathways or manifolds and channels of probability flow can be of great importance for understanding and characterizing the kinetic, thermodynamic and mechanistic properties of the system. Deeptime is a general purpose Python library offering various tools to estimate dynamical models based on time-series data including conventional linear learning methods, such as Markov state models (MSMs), Hidden Markov Models and Koopman models, as well as kernel and deep learning approaches such as VAMPnets and deep MSMs. The library is largely compatible with scikit-learn, having a range of Estimator classes for these different models, but in contrast to scikit-learn also provides deep Model classes, e.g. in the case of an MSM, which provide a multitude of analysis methods to compute interesting thermodynamic, kinetic and dynamical quantities, such as free energies, relaxation times and transition paths. The library is designed for ease of use but also easily maintainable and extensible code. In this paper we introduce the main features and structure of the deeptime software.
Discovery of Physics from Data: Universal Laws and Discrepancy Models
Jun 19, 2019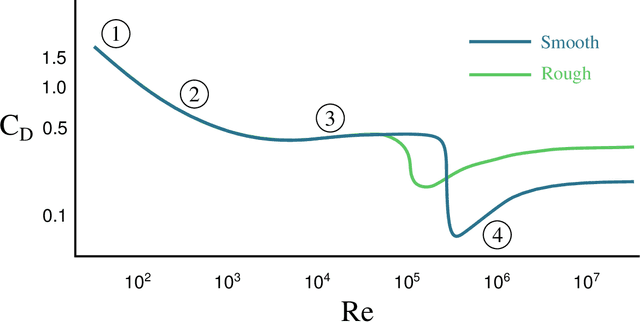
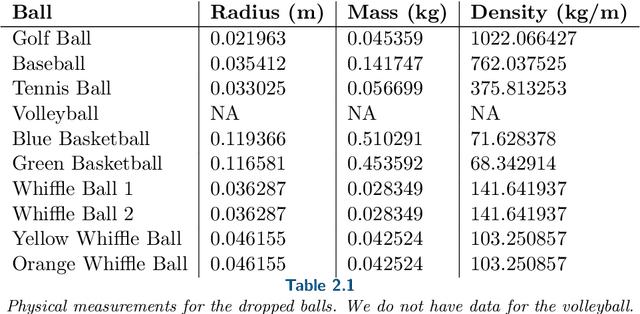

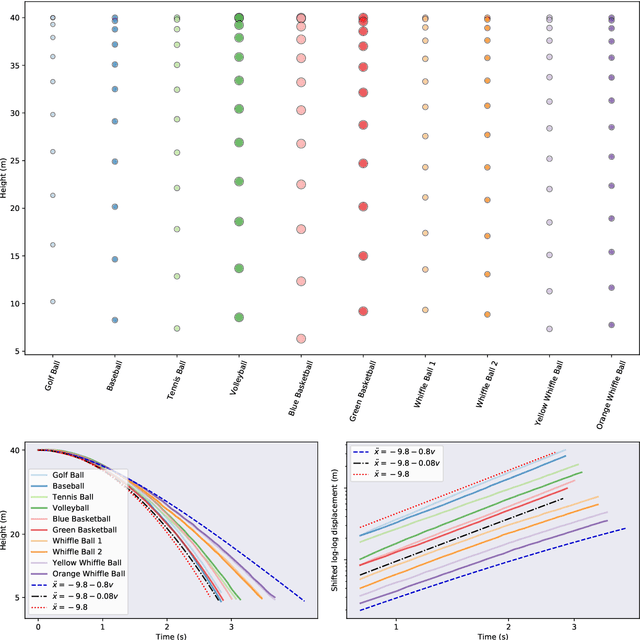
Machine learning (ML) and artificial intelligence (AI) algorithms are now being used to automate the discovery of physics principles and governing equations from measurement data alone. However, positing a universal physical law from data is challenging without simultaneously proposing an accompanying discrepancy model to account for the inevitable mismatch between theory and measurements. By revisiting the classic problem of modeling falling objects of different size and mass, we highlight a number of subtle and nuanced issues that must be addressed by modern data-driven methods for the automated discovery of physics. Specifically, we show that measurement noise and complex secondary physical mechanisms, such as unsteady fluid drag forces, can obscure the underlying law of gravitation, leading to an erroneous model. Without proposing an appropriate discrepancy model to handle these drag forces, the data supports an Aristotelian, versus a Galilean, theory of gravitation. Using the sparse identification of nonlinear dynamics (SINDy) algorithm, with the additional assumption that each separate falling object is governed by the same physical law, we are able to identify a viable discrepancy model to account for the fluid dynamic forces that explain the mismatch between a posited universal law of gravity and the measurement data. This work highlights the fact that the simple application of ML/AI will generally be insufficient to extract universal physical laws without further modification.