 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLASP: Constrained Latent Shape Projection for Refining Object Shape from Robot Contact
Oct 17, 2021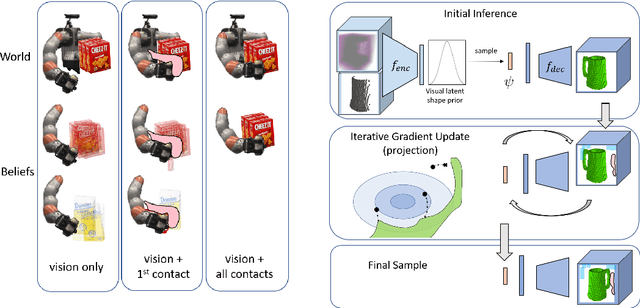

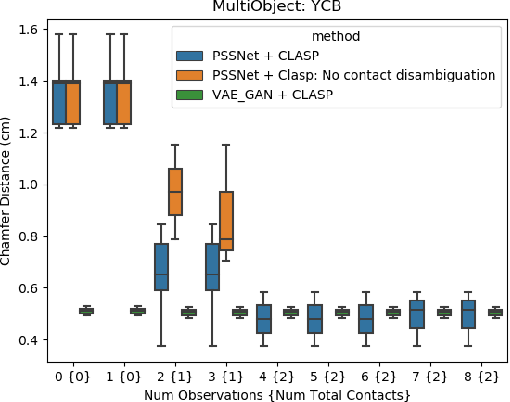

Robots need both visual and contact sensing to effectively estimate the state of their environment. Camera RGBD data provides rich information of the objects surrounding the robot, and shape priors can help correct noise and fill in gaps and occluded regions. However, when the robot senses unexpected contact, the estimate should be updated to explain the contact. To address this need, we propose CLASP: Constrained Latent Shape Projection. This approach consists of a shape completion network that generates a prior from RGBD data and a procedure to generate shapes consistent with both the network prior and robot contact observations. We find CLASP consistently decreases the Chamfer Distance between the predicted and ground truth scenes, while other approaches do not benefit from contact information.
SiMPLeR: A Series-Elastic Manipulator with Passive Variable Stiffness for Legged Robots
Jun 20, 2021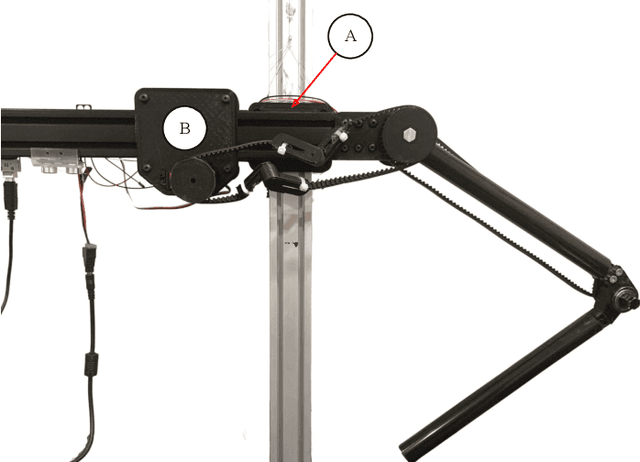
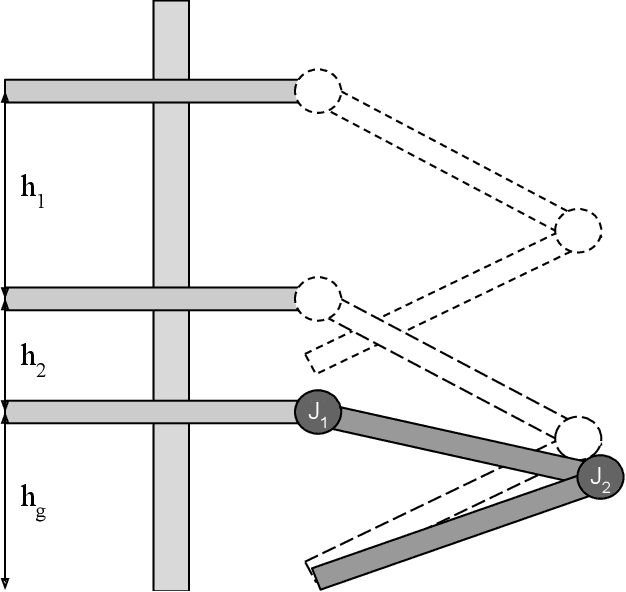
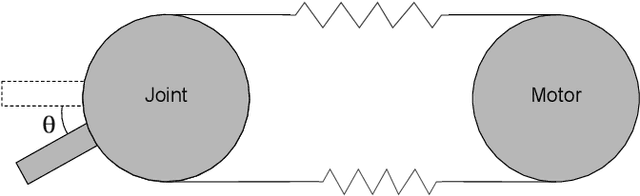
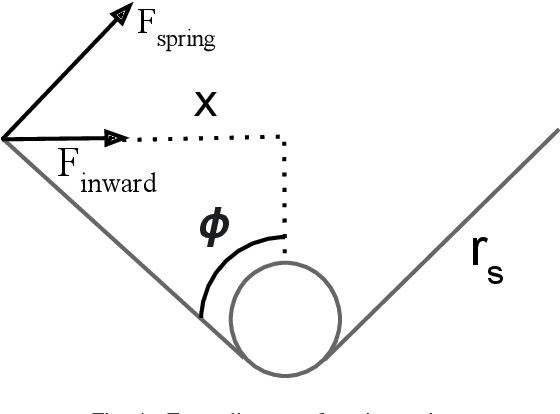
We propose a mechanically simple and cheap design for a series elastic actuator with controllable stiffness. Such characteristics are necessary for animals for running, jumping, throwing, and manipulation, yet in robots, variable stiffness actuators are either complicated or mimicked at low bandwidth through feedback controllers. A robust and simple design is needed to build reliable and cheap robots with animal capabilities. The key insight of our design is attaching torsional springs to timing belts to create a variable stiffness linear spring. In an antagonistic pair, varying the distance between motor and joint then varies the actuator stiffness. We build a prototype of our proposed actuator, show the theoretical behavior matches the experimental characterization, and demonstrate an application to robotic one-legged hopping.
Diverse Plausible Shape Completions from Ambiguous Depth Images
Nov 18, 2020
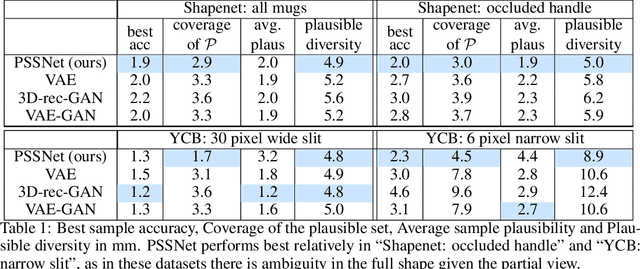
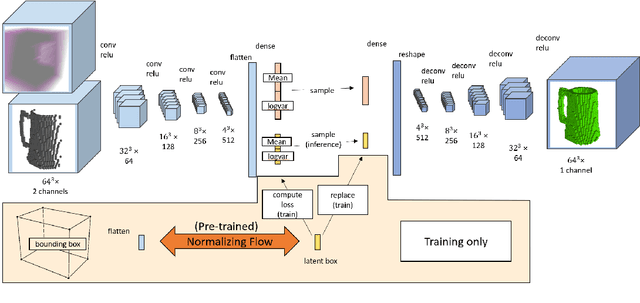

We propose PSSNet, a network architecture for generating diverse plausible 3D reconstructions from a single 2.5D depth image. Existing methods tend to produce only small variations on a single shape, even when multiple shapes are consistent with an observation. To obtain diversity we alter a Variational Auto Encoder by providing a learned shape bounding box feature as side information during training. Since these features are known during training, we are able to add a supervised loss to the encoder and noiseless values to the decoder. To evaluate, we sample a set of completions from a network, construct a set of plausible shape matches for each test observation, and compare using our plausible diversity metric defined over sets of shapes. We perform experiments using Shapenet mugs and partially-occluded YCB objects and find that our method performs comparably in datasets with little ambiguity, and outperforms existing methods when many shapes plausibly fit an observed depth image. We demonstrate one use for PSSNet on a physical robot when grasping objects in occlusion and clutter.
Fast Planning Over Roadmaps via Selective Densification
Feb 12, 2020
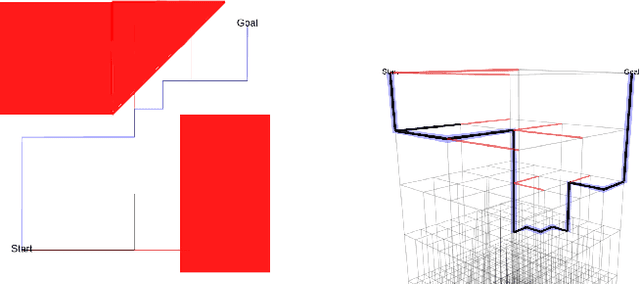


We propose the Selective Densification method for fast motion planning through configuration space. We create a sequence of roadmaps by iteratively adding configurations. We organize these roadmaps into layers and add edges between identical configurations between layers. We find a path using best-first search, guided by our proposed estimate of remaining planning time. This estimate prefers to expand nodes closer to the goal and nodes on sparser layers. We present proofs of the path quality and maximum depth of nodes expanded using our proposed graph and heuristic. We also present experiments comparing Selective Densification to bidirectional RRT-connect, as well as many graph search approaches. In difficult environments that require exploration on the dense layers we find Selective Densification finds solutions faster than all other approaches.