 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLASP: Constrained Latent Shape Projection for Refining Object Shape from Robot Contact
Paper and Code
Oct 17, 2021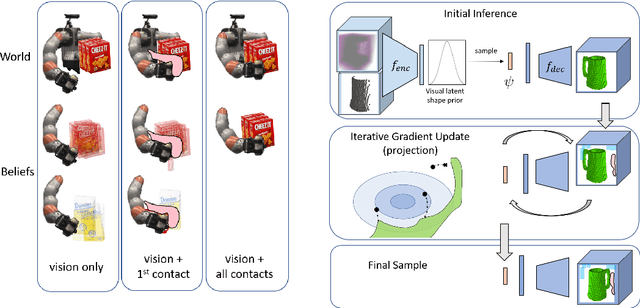

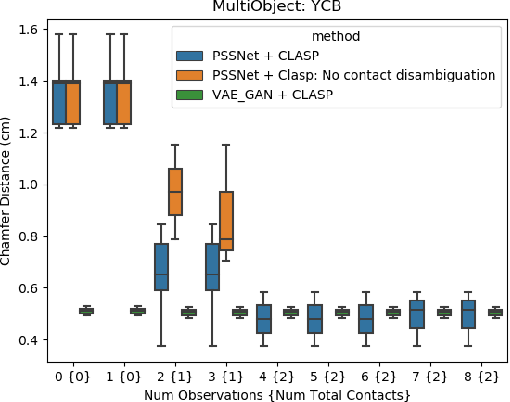

Robots need both visual and contact sensing to effectively estimate the state of their environment. Camera RGBD data provides rich information of the objects surrounding the robot, and shape priors can help correct noise and fill in gaps and occluded regions. However, when the robot senses unexpected contact, the estimate should be updated to explain the contact. To address this need, we propose CLASP: Constrained Latent Shape Projection. This approach consists of a shape completion network that generates a prior from RGBD data and a procedure to generate shapes consistent with both the network prior and robot contact observations. We find CLASP consistently decreases the Chamfer Distance between the predicted and ground truth scenes, while other approaches do not benefit from contact information.