 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSiMPLeR: A Series-Elastic Manipulator with Passive Variable Stiffness for Legged Robots
Jun 20, 2021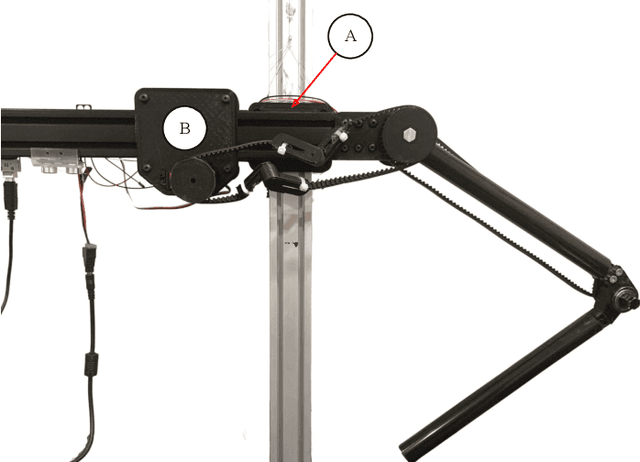
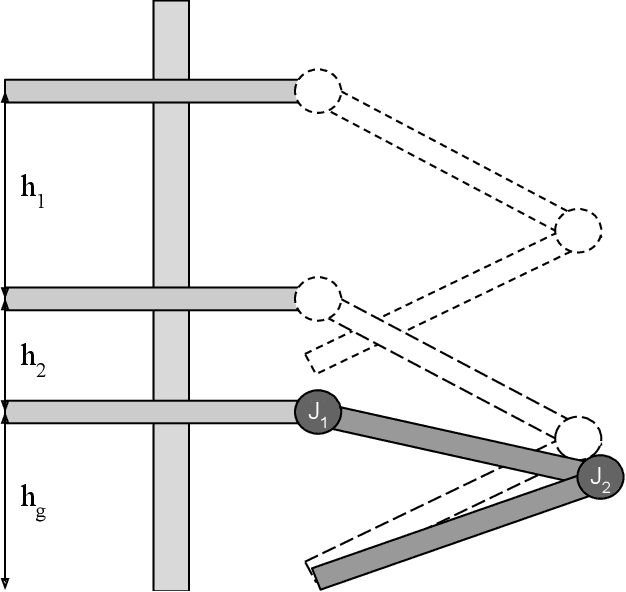
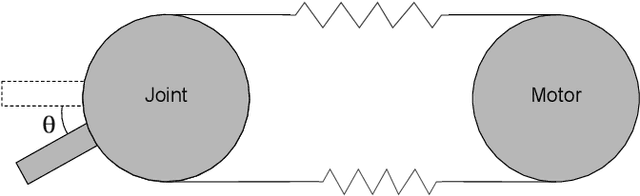
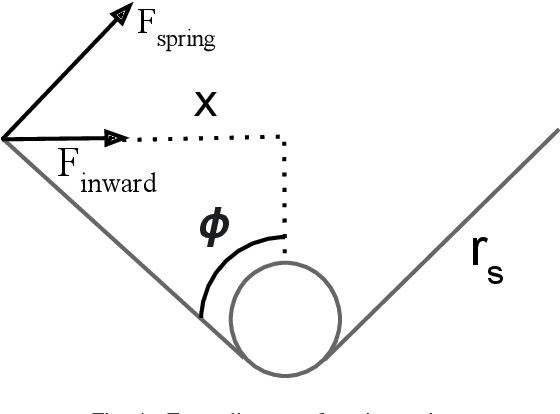
We propose a mechanically simple and cheap design for a series elastic actuator with controllable stiffness. Such characteristics are necessary for animals for running, jumping, throwing, and manipulation, yet in robots, variable stiffness actuators are either complicated or mimicked at low bandwidth through feedback controllers. A robust and simple design is needed to build reliable and cheap robots with animal capabilities. The key insight of our design is attaching torsional springs to timing belts to create a variable stiffness linear spring. In an antagonistic pair, varying the distance between motor and joint then varies the actuator stiffness. We build a prototype of our proposed actuator, show the theoretical behavior matches the experimental characterization, and demonstrate an application to robotic one-legged hopping.
Simulated Data Generation Through Algorithmic Force Coefficient Estimation for AI-Based Robotic Projectile Launch Modeling
May 28, 2021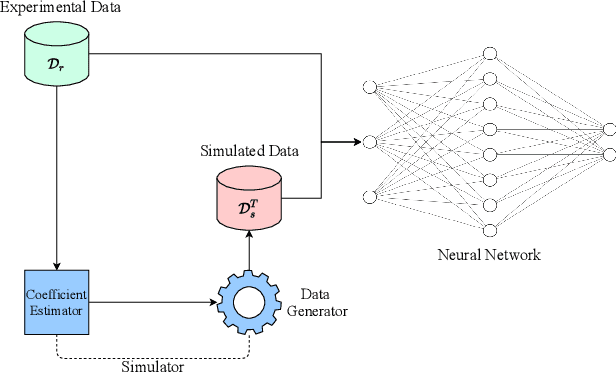
Modeling of non-rigid object launching and manipulation is complex considering the wide range of dynamics affecting trajectory, many of which may be unknown. Using physics models can be inaccurate because they cannot account for unknown factors and the effects of the deformation of the object as it is launched; moreover, deriving force coefficients for these models is not possible without extensive experimental testing. Recently, advancements in data-powered artificial intelligence methods have allowed learnable models and systems to emerge. It is desirable to train a model for launch prediction on a robot, as deep neural networks can account for immeasurable dynamics. However, the inability to collect large amounts of experimental data decreases performance of deep neural networks. Through estimating force coefficients, the accepted physics models can be leveraged to produce adequate supplemental data to artificially increase the size of the training set, yielding improved neural networks. In this paper, we introduce a new framework for algorithmic estimation of force coefficients for non-rigid object launching, which can be generalized to other domains, in order to generate large datasets. We implement a novel training algorithm and objective for our deep neural network to accurately model launch trajectory of non-rigid objects and predict whether they will hit a series of targets. Our experimental results demonstrate the effectiveness of using simulated data from force coefficient estimation and shows the importance of simulated data for training an effective neural network.