 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSiMPLeR: A Series-Elastic Manipulator with Passive Variable Stiffness for Legged Robots
Paper and Code
Jun 20, 2021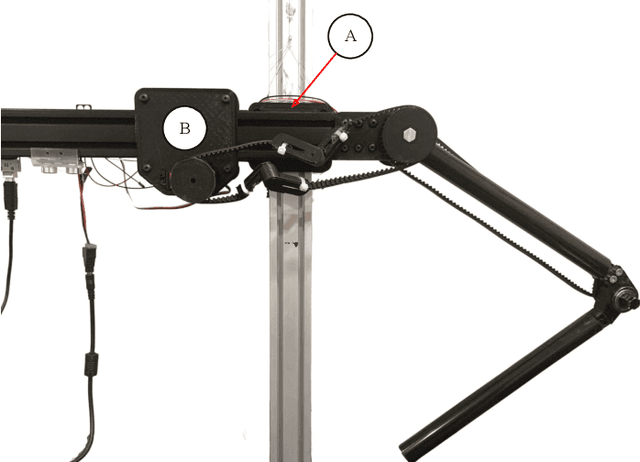
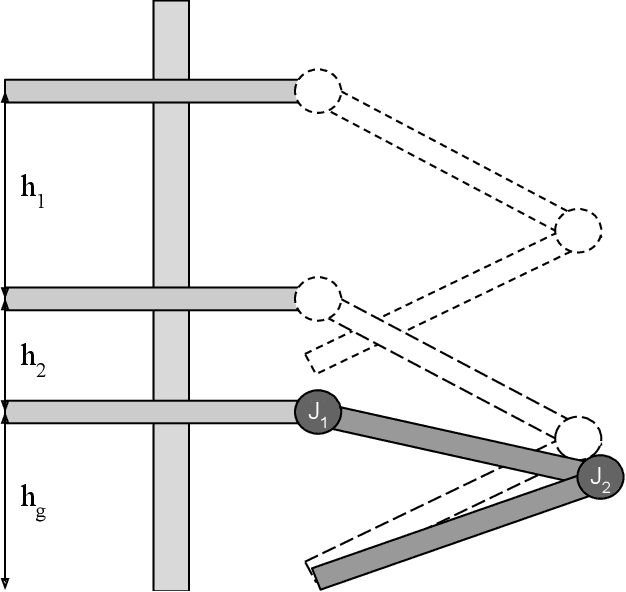
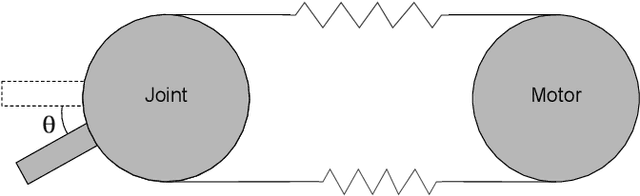
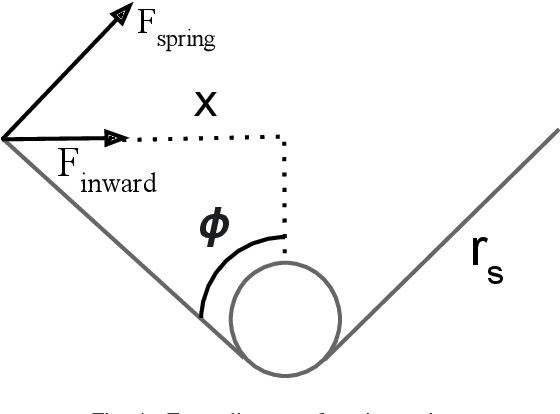
We propose a mechanically simple and cheap design for a series elastic actuator with controllable stiffness. Such characteristics are necessary for animals for running, jumping, throwing, and manipulation, yet in robots, variable stiffness actuators are either complicated or mimicked at low bandwidth through feedback controllers. A robust and simple design is needed to build reliable and cheap robots with animal capabilities. The key insight of our design is attaching torsional springs to timing belts to create a variable stiffness linear spring. In an antagonistic pair, varying the distance between motor and joint then varies the actuator stiffness. We build a prototype of our proposed actuator, show the theoretical behavior matches the experimental characterization, and demonstrate an application to robotic one-legged hopping.