 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Unsupervised Learning of Long-Term Motion Dynamics for Videos
Apr 11, 2017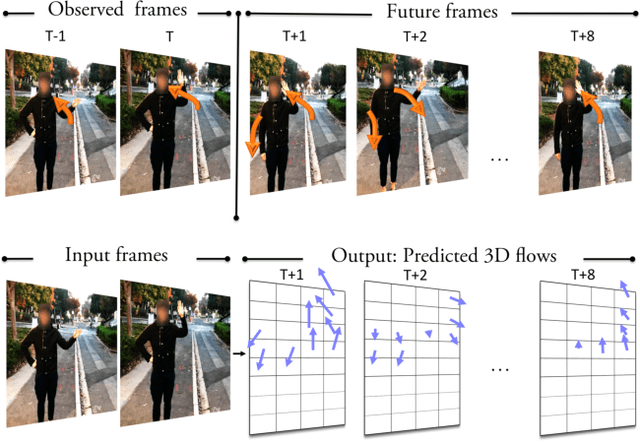
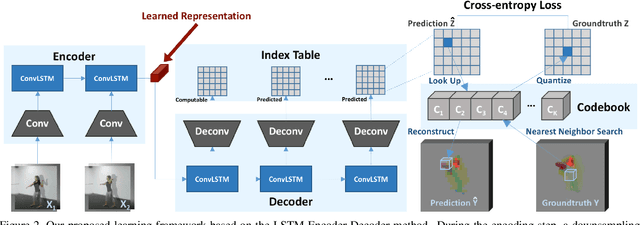
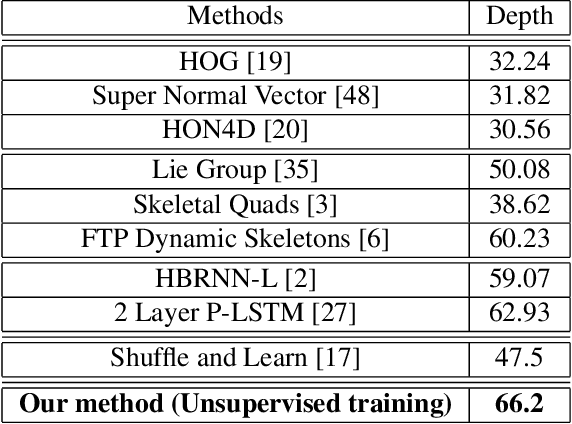
We present an unsupervised representation learning approach that compactly encodes the motion dependencies in videos. Given a pair of images from a video clip, our framework learns to predict the long-term 3D motions. To reduce the complexity of the learning framework, we propose to describe the motion as a sequence of atomic 3D flows computed with RGB-D modality. We use a Recurrent Neural Network based Encoder-Decoder framework to predict these sequences of flows. We argue that in order for the decoder to reconstruct these sequences, the encoder must learn a robust video representation that captures long-term motion dependencies and spatial-temporal relations. We demonstrate the effectiveness of our learned temporal representations on activity classification across multiple modalities and datasets such as NTU RGB+D and MSR Daily Activity 3D. Our framework is generic to any input modality, i.e., RGB, Depth, and RGB-D videos.
Towards Viewpoint Invariant 3D Human Pose Estimation
Jul 26, 2016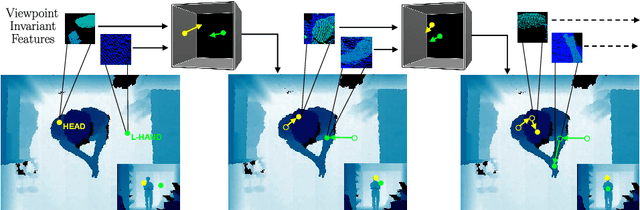
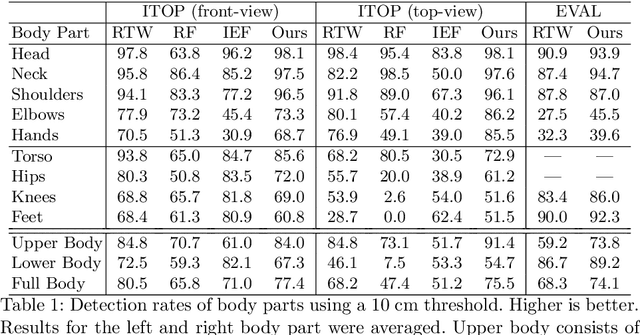
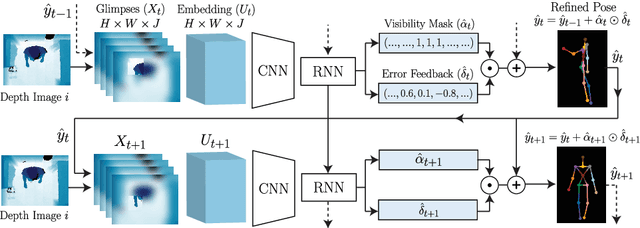
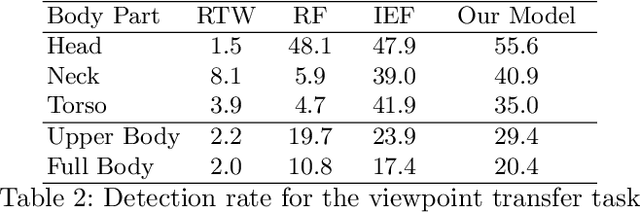
We propose a viewpoint invariant model for 3D human pose estimation from a single depth image. To achieve this, our discriminative model embeds local regions into a learned viewpoint invariant feature space. Formulated as a multi-task learning problem, our model is able to selectively predict partial poses in the presence of noise and occlusion. Our approach leverages a convolutional and recurrent network architecture with a top-down error feedback mechanism to self-correct previous pose estimates in an end-to-end manner. We evaluate our model on a previously published depth dataset and a newly collected human pose dataset containing 100K annotated depth images from extreme viewpoints. Experiments show that our model achieves competitive performance on frontal views while achieving state-of-the-art performance on alternate viewpoints.