 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Registration of Images with Inconsistent Content Through Line-Support Region Segmentation and Geometrical Outlier Removal
Apr 02, 2022


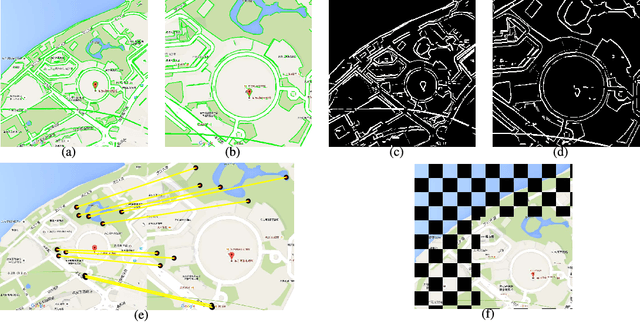
The implementation of automatic image registration is still difficult in various applications. In this paper, an automatic image registration approach through line-support region segmentation and geometrical outlier removal (ALRS-GOR) is proposed. This new approach is designed to address the problems associated with the registration of images with affine deformations and inconsistent content, such as remote sensing images with different spectral content or noise interference, or map images with inconsistent annotations. To begin with, line-support regions, namely a straight region whose points share roughly the same image gradient angle, are extracted to address the issues of inconsistent content existing in images. To alleviate the incompleteness of line segments, an iterative strategy with multi-resolution is employed to preserve global structures that are masked at full resolution by image details or noise. Then, Geometrical Outlier Removal (GOR) is developed to provide reliable feature point matching, which is based on affineinvariant geometrical classifications for corresponding matches initialized by SIFT. The candidate outliers are selected by comparing the disparity of accumulated classifications among all matches, instead of conventional methods which only rely on local geometrical relations. Various image sets have been considered in this paper for the evaluation of the proposed approach, including aerial images with simulated affine deformations, remote sensing optical and synthetic aperture radar images taken at different situations (multispectral, multisensor, and multitemporal), and map images with inconsistent annotations. Experimental results demonstrate the superior performance of the proposed method over the existing approaches for the whole data set.
RFVTM: A Recovery and Filtering Vertex Trichotomy Matching for Remote Sensing Image Registration
Apr 02, 2022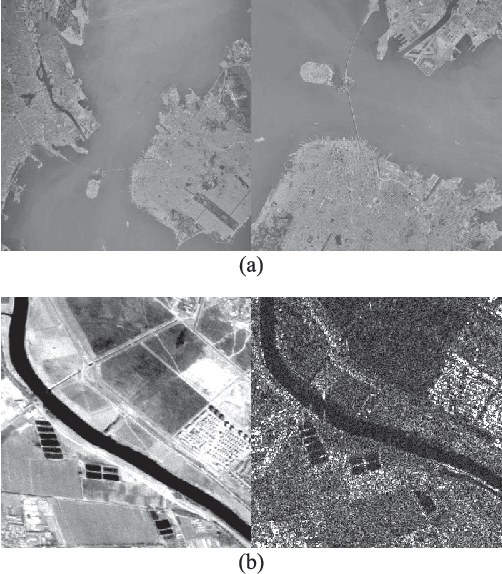
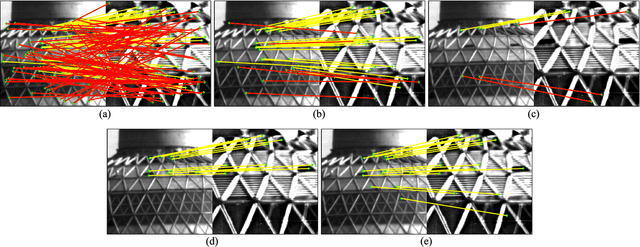
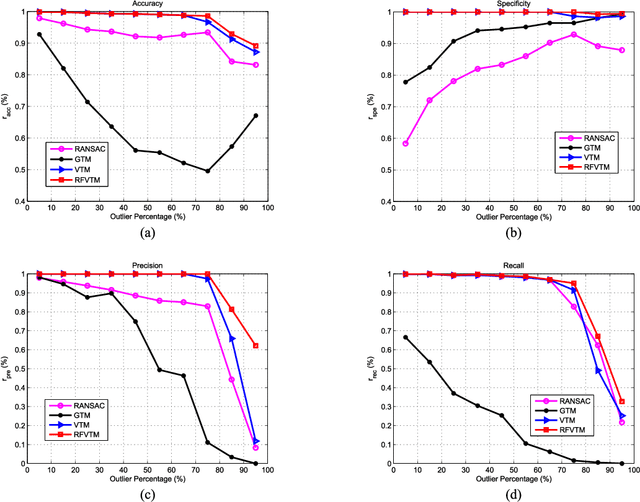
Reliable feature point matching is a vital yet challenging process in feature-based image registration. In this paper,a robust feature point matching algorithm called Recovery and Filtering Vertex Trichotomy Matching (RFVTM) is proposed to remove outliers and retain sufficient inliers for remote sensing images. A novel affine invariant descriptor called vertex trichotomy descriptor is proposed on the basis of that geometrical relations between any of vertices and lines are preserved after affine transformations, which is constructed by mapping each vertex into trichotomy sets. The outlier removals in Vertex Trichotomy Matching (VTM) are implemented by iteratively comparing the disparity of corresponding vertex trichotomy descriptors. Some inliers mistakenly validated by a large amount of outliers are removed in VTM iterations, and several residual outliers close to correct locations cannot be excluded with the same graph structures. Therefore, a recovery and filtering strategy is designed to recover some inliers based on identical vertex trichotomy descriptors and restricted transformation errors. Assisted with the additional recovered inliers, residual outliers can also be filtered out during the process of reaching identical graph for the expanded vertex sets. Experimental results demonstrate the superior performance on precision and stability of this algorithm under various conditions, such as remote sensing images with large transformations, duplicated patterns, or inconsistent spectral content.