 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Supported Maritime Search System: Experience from Valun Bay Field Trials
Feb 09, 2026This paper presents the integration of flow field reconstruction, dynamic probabilistic modeling, search control, and machine vision detection in a system for autonomous maritime search operations. Field experiments conducted in Valun Bay (Cres Island, Croatia) involved real-time drifter data acquisition, surrogate flow model fitting based on computational fluid dynamics and numerical optimization, advanced multi-UAV search control and vision sensing, as well as deep learning-based object detection. The results demonstrate that a tightly coupled approach enables reliable detection of floating targets under realistic uncertainties and complex environmental conditions, providing concrete insights for future autonomous maritime search and rescue applications.
Fast algorithm for centralized multi-agent maze exploration
Oct 03, 2023Recent advancements in robotics have paved the way for robots to replace humans in perilous situations, such as searching for victims in blazing buildings, earthquake-damaged structures, uncharted caves, traversing minefields, or patrolling crime-ridden streets. These challenges can be generalized as problems where agents need to explore unknown mazes. Although various algorithms for single-agent maze exploration exist, extending them to multi-agent systems poses complexities. We propose a solution: a cooperative multi-agent system of automated mobile agents for exploring unknown mazes and locating stationary targets. Our algorithm employs a potential field governing maze exploration, integrating cooperative agent behaviors like collision avoidance, coverage coordination, and path planning. This approach builds upon the Heat Equation Driven Area Coverage (HEDAC) method by Ivi\'c, Crnkovi\'c, and Mezi\'c. Unlike previous continuous domain applications, we adapt HEDAC for discrete domains, specifically mazes divided into nodes. Our algorithm is versatile, easily modified for anti-collision requirements, and adaptable to expanding mazes and numerical meshes over time. Comparative evaluations against alternative maze-solving methods illustrate our algorithm's superiority. The results highlight significant enhancements, showcasing its applicability across diverse mazes. Numerical simulations affirm its robustness, adaptability, scalability, and simplicity, enabling centralized parallel computation in autonomous systems of basic agents/robots.
Multi-UAV trajectory planning for 3D visual inspection of complex structures
Apr 21, 2022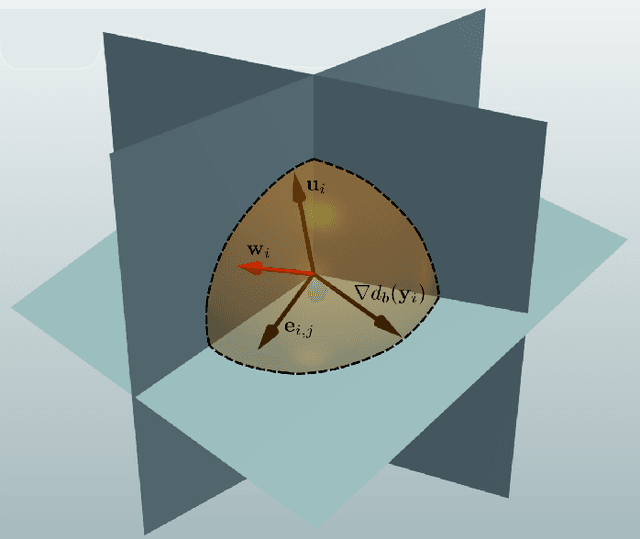
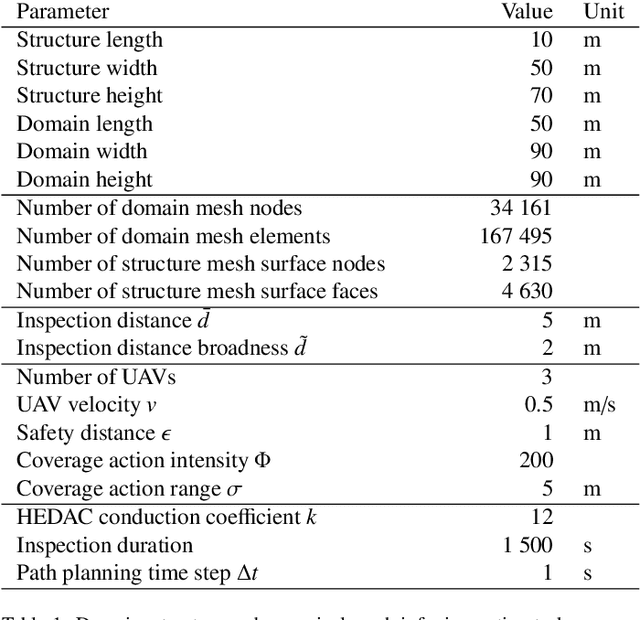
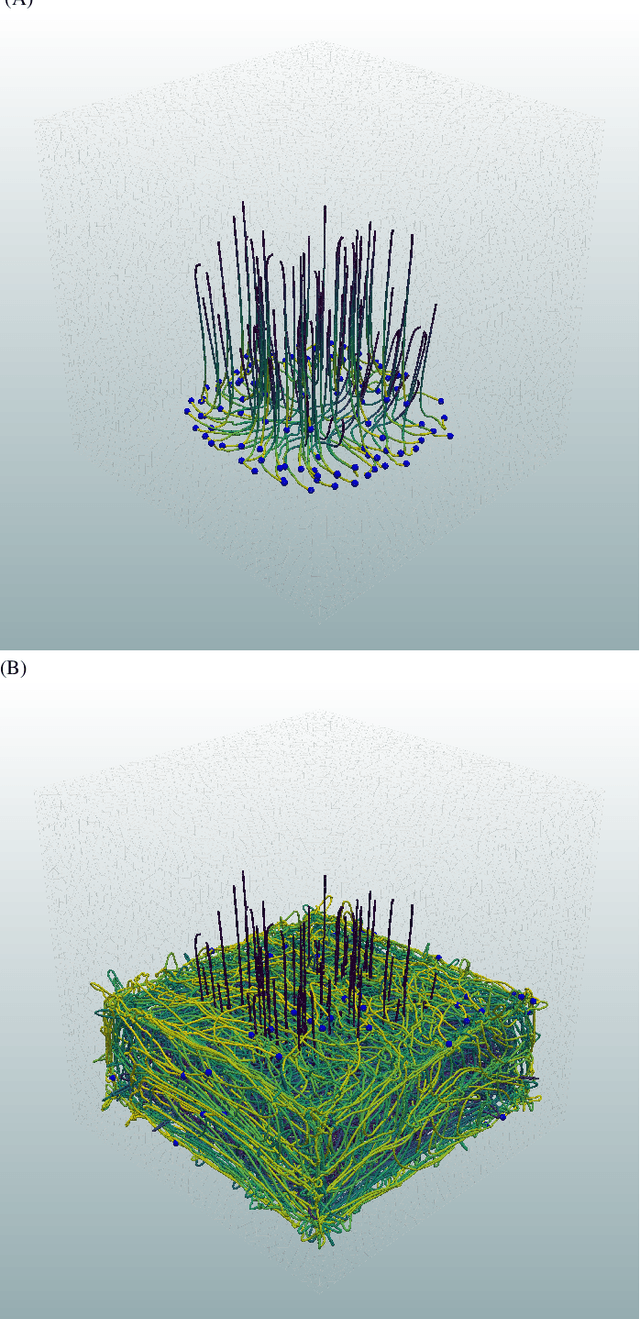
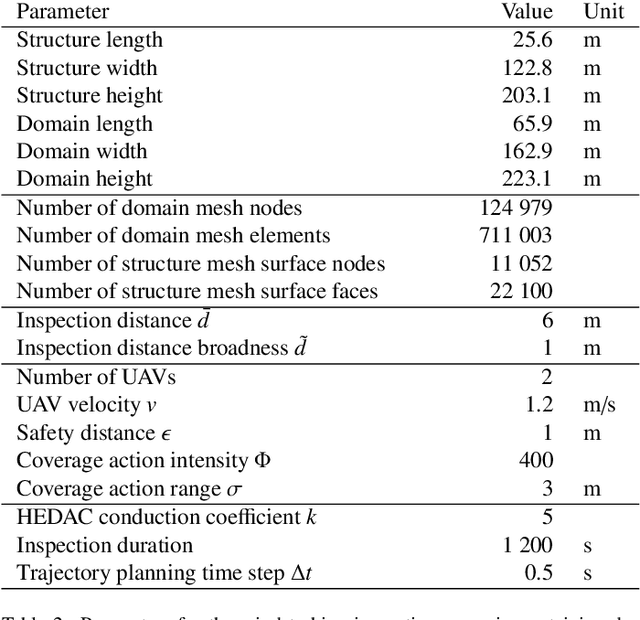
This paper presents a new trajectory planning algorithm for 3D autonomous UAV volume coverage and visual inspection. The algorithm is an extension of a state-of-the-art Heat Equation Driven Area Coverage (HEDAC) multi-agent area coverage algorithm for 3D domains. With a given target exploration density field, the algorithm designs a potential field and directs UAVs to the regions of higher potential, i.e., higher values of remaining density. Collisions between the agents and agents with domain boundaries are prevented by implementing the distance field and correcting the agent's directional vector when the distance threshold is reached. A unit cube test case is considered to evaluate this trajectory planning strategy for volume coverage. For visual inspection applications, the algorithm is supplemented with camera direction control. A field containing the nearest distance from any point in the domain to the structure surface is designed. The gradient of this field is calculated to obtain the camera orientation throughout the trajectory. Three different test cases of varying complexities are considered to validate the proposed method for visual inspection. The simplest scenario is a synthetic portal-like structure inspected using three UAVs. The other two inspection scenarios are based on realistic structures where UAVs are commonly utilized: a wind turbine and a bridge. When deployed to a wind turbine inspection, two simulated UAVs traversing smooth spiral trajectories have successfully explored the entire turbine structure while cameras are directed to the curved surfaces of the turbine's blades. In the bridge test case an efficacious visual inspection of a complex structure is demonstrated by employing a single UAV and five UAVs. The proposed methodology is successful, flexible and applicable in real-world UAV inspection tasks.
Constrained multi-agent ergodic area surveying control based on finite element approximation of the potential field
Oct 12, 2021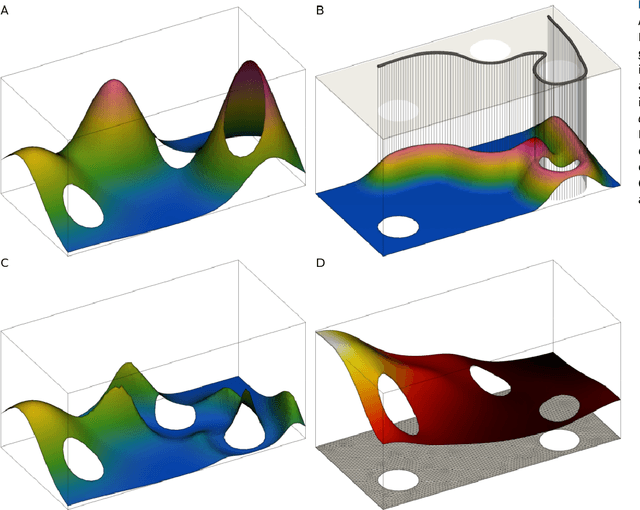
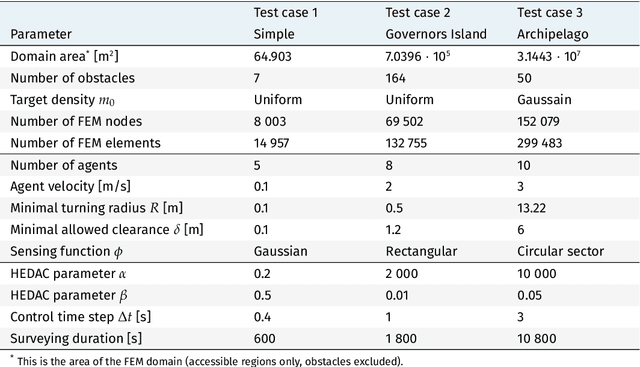
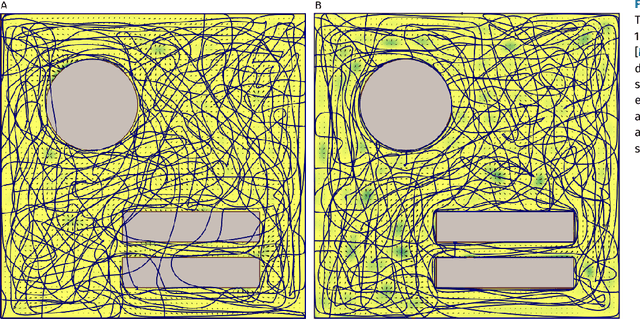
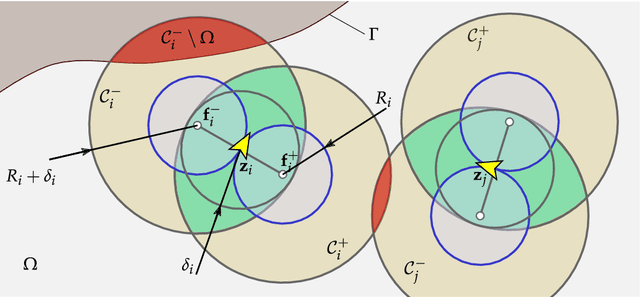
Heat Equation Driven Area Coverage (HEDAC) is a state-of-the-art multi-agent ergodic motion control guided by a gradient of a potential field. A finite element method is hereby implemented to obtain a solution of Helmholtz partial differential equation, which models the potential field for surveying motion control. This allows us to survey arbitrarily shaped domains and to include obstacles in an elegant and robust manner intrinsic to HEDAC's fundamental idea. For a simple kinematic motion, the obstacles and boundary avoidance constraints are successfully handled by directing the agent motion with the gradient of the potential. However, including additional constraints, such as the minimal clearance dsitance from stationary and moving obstacles and the minimal path curvature radius, requires further alternations of the control algorithm. We introduce a relatively simple yet robust approach for handling these constraints by formulating a straightforward optimization problem based on collision-free escapes route maneuvers. This approach provides a guaranteed collision avoidance mechanism, while being computationally inexpensive as a result of the optimization problem partitioning. The proposed motion control is evaluated in three realistic surveying scenarios simulations, showing the effectiveness of the surveying and the robustness of the control algorithm. Furthermore, potential maneuvering difficulties due to improperly defined surveying scenarios are highlighted and we provide guidelines on how to overpass them. The results are promising and indiacate real-world applicability of proposed constrained multi-agent motion control for autonomous surveying and potentially other HEDAC utilizations.
Search strategy in a complex and dynamic environment: the MH370 case
Apr 29, 2020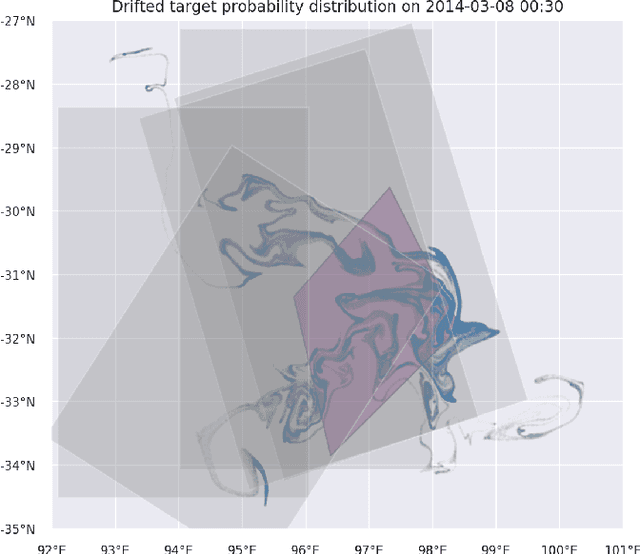
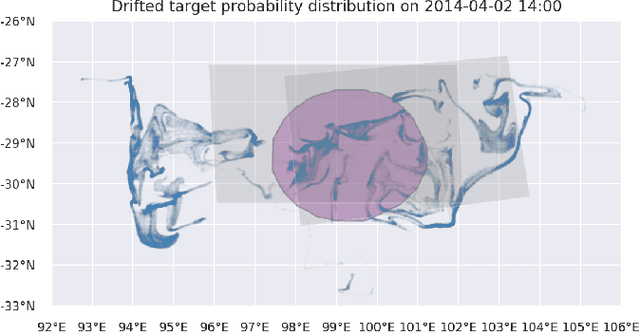
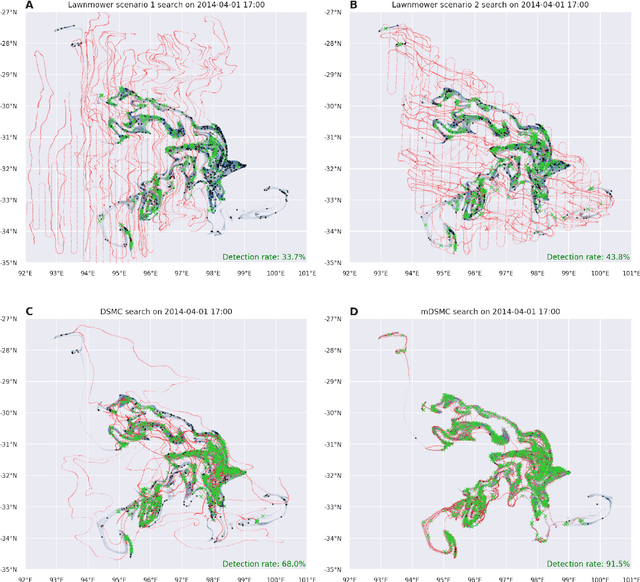
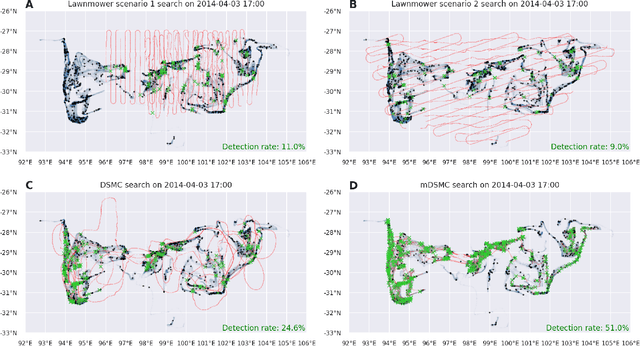
Search and detection of objects on the ocean surface is a challenging task due to the complexity of the drift dynamics and lack of known optimal solutions for the path of the search agents. This challenge was highlighted by the unsuccessful search for Malaysian Flight 370 (MH370) which disappeared on March 8, 2014. In this paper, we propose an improvement of a search algorithm rooted in the ergodic theory of dynamical systems which can accommodate complex geometries and uncertainties of the drifting search areas on the ocean surface. We illustrate the effectiveness of this algorithm in a computational replication of the conducted search for MH370. In comparison to conventional search methods, the proposed algorithm leads to an order of magnitude improvement in success rate over the time period of the actual search operation. Simulations of the proposed search control also indicate that the initial success rate of finding debris increases in the event of delayed search commencement. This is due to the existence of convergence zones in the search area which leads to local aggregation of debris in those zones and hence reduction of the effective size of the area to be searched.