 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgerStar2-Agent: Agentic Reasoning Technical Report
Aug 28, 2025We introduce rStar2-Agent, a 14B math reasoning model trained with agentic reinforcement learning to achieve frontier-level performance. Beyond current long CoT, the model demonstrates advanced cognitive behaviors, such as thinking carefully before using Python coding tools and reflecting on code execution feedback to autonomously explore, verify, and refine intermediate steps in complex problem-solving. This capability is enabled through three key innovations that makes agentic RL effective at scale: (i) an efficient RL infrastructure with a reliable Python code environment that supports high-throughput execution and mitigates the high rollout costs, enabling training on limited GPU resources (64 MI300X GPUs); (ii) GRPO-RoC, an agentic RL algorithm with a Resample-on-Correct rollout strategy that addresses the inherent environment noises from coding tools, allowing the model to reason more effectively in a code environment; (iii) An efficient agent training recipe that starts with non-reasoning SFT and progresses through multi-RL stages, yielding advanced cognitive abilities with minimal compute cost. To this end, rStar2-Agent boosts a pre-trained 14B model to state of the art in only 510 RL steps within one week, achieving average pass@1 scores of 80.6% on AIME24 and 69.8% on AIME25, surpassing DeepSeek-R1 (671B) with significantly shorter responses. Beyond mathematics, rStar2-Agent-14B also demonstrates strong generalization to alignment, scientific reasoning, and agentic tool-use tasks. Code and training recipes are available at https://github.com/microsoft/rStar.
rStar-Coder: Scaling Competitive Code Reasoning with a Large-Scale Verified Dataset
May 27, 2025Advancing code reasoning in large language models (LLMs) is fundamentally limited by the scarcity of high-difficulty datasets, especially those with verifiable input-output test cases necessary for rigorous solution validation at scale. We introduce rStar-Coder, which significantly improves LLM code reasoning capabilities by constructing a large-scale, verified dataset of 418K competition-level code problems, 580K long-reasoning solutions along with rich test cases of varying difficulty. This is achieved through three core contributions: (1) we curate competitive programming code problems and oracle solutions to synthesize new, solvable problems; (2) we introduce a reliable input-output test case synthesis pipeline that decouples the generation into a three-step input generation method and a mutual verification mechanism for effective output labeling; (3) we augment problems with high-quality, test-case-verified long-reasoning solutions. Extensive experiments on Qwen models (1.5B-14B) across various code reasoning benchmarks demonstrate the superiority of rStar-Coder dataset, achieving leading performance comparable to frontier reasoning LLMs with much smaller model sizes. On LiveCodeBench, rStar-Coder improves Qwen2.5-7B from 17.4% to an impressive 57.3%, and Qwen2.5-14B from 23.3% to 62.5%, surpassing o3-mini (low) by3.1%. On the more challenging USA Computing Olympiad, our 7B model achieves an average pass@1 accuracy of 16.15%, outperforming the frontier-level QWQ-32B. Code and the dataset will be released at https://github.com/microsoft/rStar.
More Pictures Say More: Visual Intersection Network for Open Set Object Detection
Aug 26, 2024Open Set Object Detection has seen rapid development recently, but it continues to pose significant challenges. Language-based methods, grappling with the substantial modal disparity between textual and visual modalities, require extensive computational resources to bridge this gap. Although integrating visual prompts into these frameworks shows promise for enhancing performance, it always comes with constraints related to textual semantics. In contrast, viusal-only methods suffer from the low-quality fusion of multiple visual prompts. In response, we introduce a strong DETR-based model, Visual Intersection Network for Open Set Object Detection (VINO), which constructs a multi-image visual bank to preserve the semantic intersections of each category across all time steps. Our innovative multi-image visual updating mechanism learns to identify the semantic intersections from various visual prompts, enabling the flexible incorporation of new information and continuous optimization of feature representations. Our approach guarantees a more precise alignment between target category semantics and region semantics, while significantly reducing pre-training time and resource demands compared to language-based methods. Furthermore, the integration of a segmentation head illustrates the broad applicability of visual intersection in various visual tasks. VINO, which requires only 7 RTX4090 GPU days to complete one epoch on the Objects365v1 dataset, achieves competitive performance on par with vision-language models on benchmarks such as LVIS and ODinW35.
DMNR: Unsupervised De-noising of Point Clouds Corrupted by Airborne Particles
May 10, 2023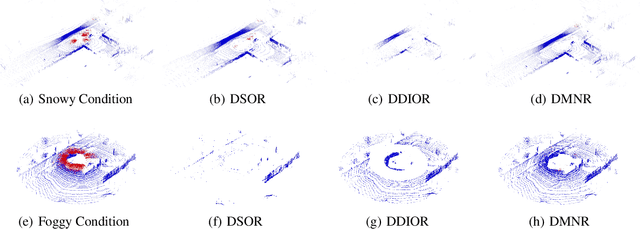
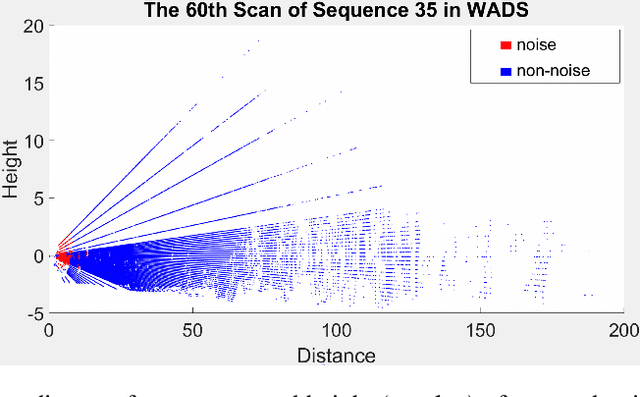
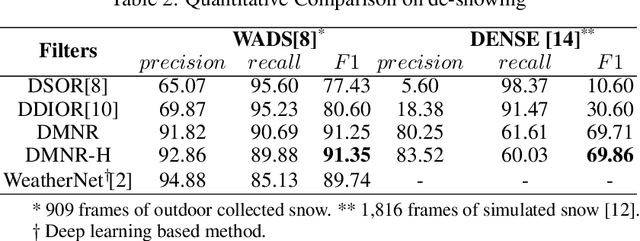
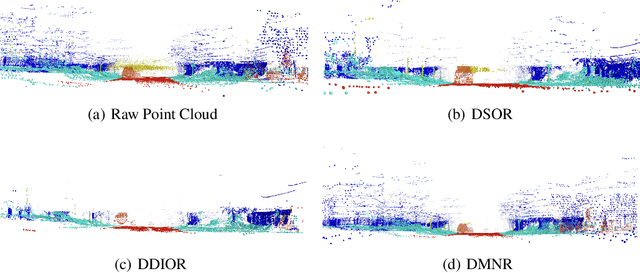
LiDAR sensors are critical for autonomous driving and robotics applications due to their ability to provide accurate range measurements and their robustness to lighting conditions. However, airborne particles, such as fog, rain, snow, and dust, will degrade its performance and it is inevitable to encounter these inclement environmental conditions outdoors. It would be a straightforward approach to remove them by supervised semantic segmentation. But annotating these particles point wisely is too laborious. To address this problem and enhance the perception under inclement conditions, we develop two dynamic filtering methods called Dynamic Multi-threshold Noise Removal (DMNR) and DMNR-H by accurate analysis of the position distribution and intensity characteristics of noisy points and clean points on publicly available WADS and DENSE datasets. Both DMNR and DMNR-H outperform state-of-the-art unsupervised methods by a significant margin on the two datasets and are slightly better than supervised deep learning-based methods. Furthermore, our methods are more robust to different LiDAR sensors and airborne particles, such as snow and fog.