 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping a Grounded View of AI
Nov 18, 2025As a capability coming from computation, how does AI differ fundamentally from the capabilities delivered by rule-based software program? The paper examines the behavior of artificial intelligence (AI) from engineering points of view to clarify its nature and limits. The paper argues that the rationality underlying humanity's impulse to pursue, articulate, and adhere to rules deserves to be valued and preserved. Identifying where rule-based practical rationality ends is the beginning of making it aware until action. Although the rules of AI behaviors are still hidden or only weakly observable, the paper has proposed a methodology to make a sense of discrimination possible and practical to identify the distinctions of the behavior of AI models with three types of decisions. It is a prerequisite for human responsibilities with alternative possibilities, considering how and when to use AI. It would be a solid start for people to ensure AI system soundness for the well-being of humans, society, and the environment.
Constrained Reinforcement Learning for Dynamic Material Handling
May 23, 2023
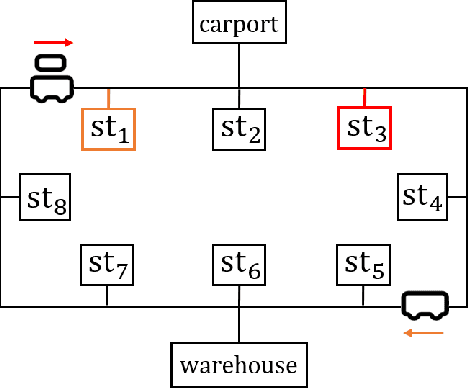


As one of the core parts of flexible manufacturing systems, material handling involves storage and transportation of materials between workstations with automated vehicles. The improvement in material handling can impulse the overall efficiency of the manufacturing system. However, the occurrence of dynamic events during the optimisation of task arrangements poses a challenge that requires adaptability and effectiveness. In this paper, we aim at the scheduling of automated guided vehicles for dynamic material handling. Motivated by some real-world scenarios, unknown new tasks and unexpected vehicle breakdowns are regarded as dynamic events in our problem. We formulate the problem as a constrained Markov decision process which takes into account tardiness and available vehicles as cumulative and instantaneous constraints, respectively. An adaptive constrained reinforcement learning algorithm that combines Lagrangian relaxation and invalid action masking, named RCPOM, is proposed to address the problem with two hybrid constraints. Moreover, a gym-like dynamic material handling simulator, named DMH-GYM, is developed and equipped with diverse problem instances, which can be used as benchmarks for dynamic material handling. Experimental results on the problem instances demonstrate the outstanding performance of our proposed approach compared with eight state-of-the-art constrained and non-constrained reinforcement learning algorithms, and widely used dispatching rules for material handling.
Robust Deep Learning Models Against Semantic-Preserving Adversarial Attack
Apr 08, 2023



Deep learning models can be fooled by small $l_p$-norm adversarial perturbations and natural perturbations in terms of attributes. Although the robustness against each perturbation has been explored, it remains a challenge to address the robustness against joint perturbations effectively. In this paper, we study the robustness of deep learning models against joint perturbations by proposing a novel attack mechanism named Semantic-Preserving Adversarial (SPA) attack, which can then be used to enhance adversarial training. Specifically, we introduce an attribute manipulator to generate natural and human-comprehensible perturbations and a noise generator to generate diverse adversarial noises. Based on such combined noises, we optimize both the attribute value and the diversity variable to generate jointly-perturbed samples. For robust training, we adversarially train the deep learning model against the generated joint perturbations. Empirical results on four benchmarks show that the SPA attack causes a larger performance decline with small $l_{\infty}$ norm-ball constraints compared to existing approaches. Furthermore, our SPA-enhanced training outperforms existing defense methods against such joint perturbations.