 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePassive knee flexion increases forward impulse of the trailing leg during the step-to-step transition
Nov 20, 2024Human walking efficiency relies on the elastic recoil of the Achilles tendon, facilitated by a "catapult mechanism" that stores energy during stance and releases it during push-off. The catapult release mechanism could include the passive flexion of the knee, as the main part of knee flexion was reported to happen passively after leading leg touch-down. This study is the first to investigate the effects of passive versus active knee flexion initiation, using the bipedal EcoWalker-2 robot with passive ankles. By leveraging the precision of robotic measurements, we aimed to elucidate the importance of timing of gait events and its impact on momentum and kinetic energy changes of the robot. The EcoWalker-2 walked successfully with both initiation methods, maintaining toe clearance. Passive knee flexion initiation resulted in a 3% of the gait cycle later onset of ankle plantar flexion, leading to 87% larger increase in the trailing leg horizontal momentum, and 188% larger magnitude increase in the center of mass momentum vector during the step-to-step transition. Our findings highlight the role of knee flexion in the release of the catapult, and timing of gait events, providing insights into human-like walking mechanics and potential applications in rehabilitation, orthosis, and prosthesis development.
Multi-segmented Adaptive Feet for Versatile Legged Locomotion in Natural Terrain
Sep 18, 2022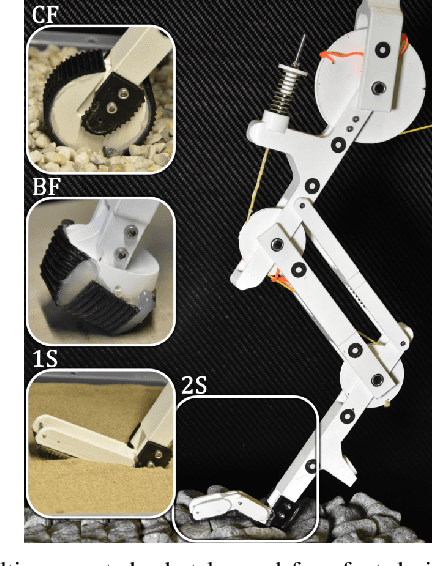
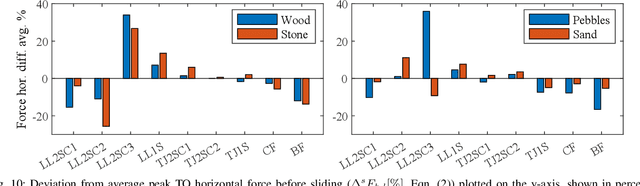
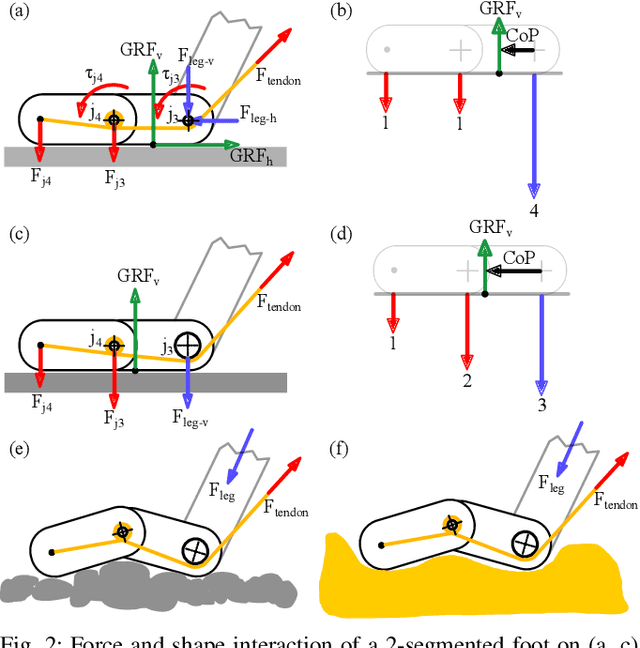
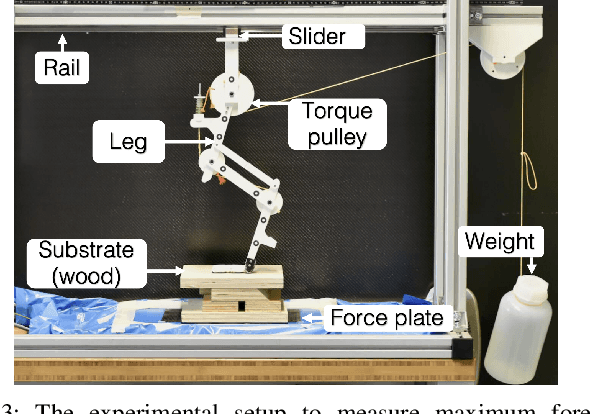
Most legged robots are built with leg structures from serially mounted links and actuators and are controlled through complex controllers and sensor feedback. In comparison, animals developed multi-segment legs, mechanical coupling between joints, and multi-segmented feet. They run agile over all terrains, arguably with simpler locomotion control. Here we focus on developing foot mechanisms that resist slipping and sinking also in natural terrain. We present first results of multi-segment feet mounted to a bird-inspired robot leg with multi-joint mechanical tendon coupling. Our one- and two-segment, mechanically adaptive feet show increased viable horizontal forces on multiple soft and hard substrates before starting to slip. We also observe that segmented feet reduce sinking on soft substrates compared to ball-feet and cylinder-feet. We report how multi-segmented feet provide a large range of viable centre of pressure points well suited for bipedal robots, but also for quadruped robots on slopes and natural terrain. Our results also offer a functional understanding of segmented feet in animals like ratite birds.
Power to the springs: Passive elements are sufficient to drive push-off in human walking
Apr 29, 2022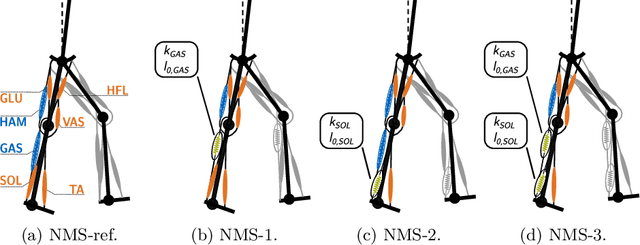
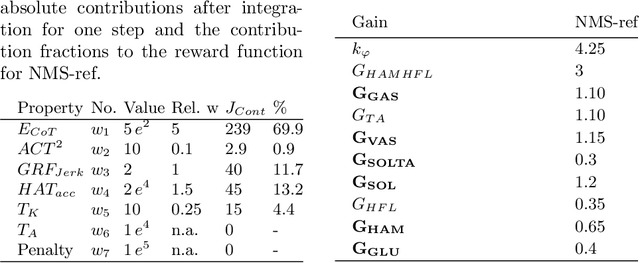
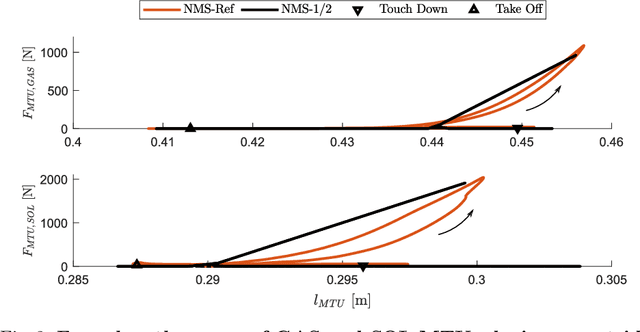
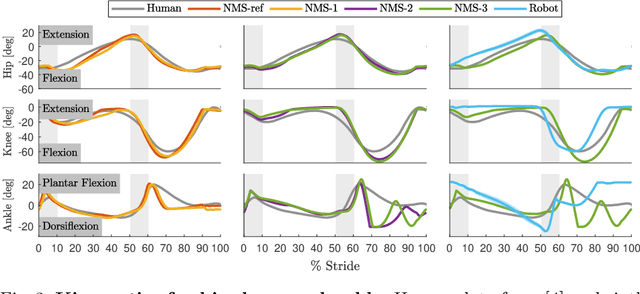
For the impulsive ankle push-off (APO) observed in human walking two muscle-tendon-units (MTUs) spanning the ankle joint play an important role: Gastrocnemius (GAS) and Soleus (SOL). GAS and SOL load the Achilles tendon to store elastic energy during stance followed by a rapid energy release during APO. We use a neuromuscular simulation (NMS) and a bipedal robot to investigate the role of GAS and SOL on the APO. We optimize the simulation for a robust gait and then sequentially replace the MTUs of (1) GAS, (2) SOL and (3) GAS and SOL by linear springs. To validate the simulation, we implement NMS-3 on a bipedal robot. Simulation and robot walk steady for all trials showing an impulsive APO. Our results imply that the elastic MTU properties shape the impulsive APO. For prosthesis or robot design that is, no complex ankle actuation is needed to obtain an impulsive APO, if more mechanical intelligence is incorporated in the design.
Investigation on a bipedal robot: Why do humans need both Soleus andGastrocnemius muscles for ankle push-off during walking?
Mar 03, 2022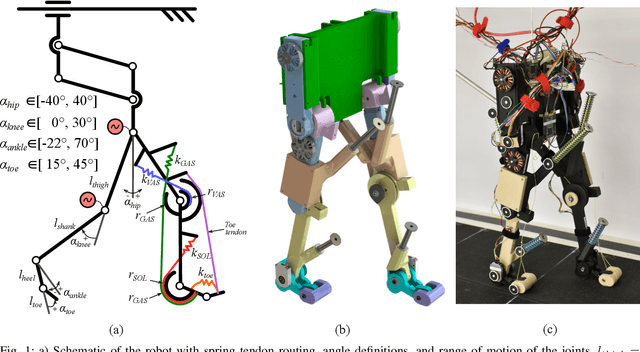
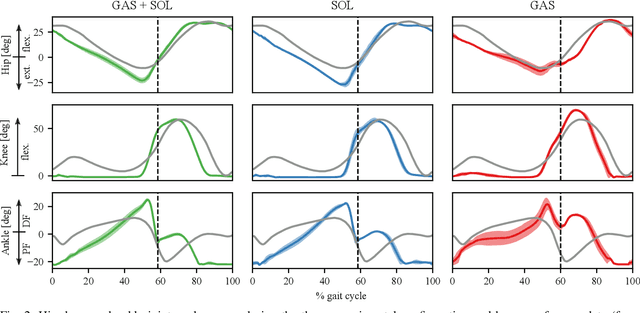
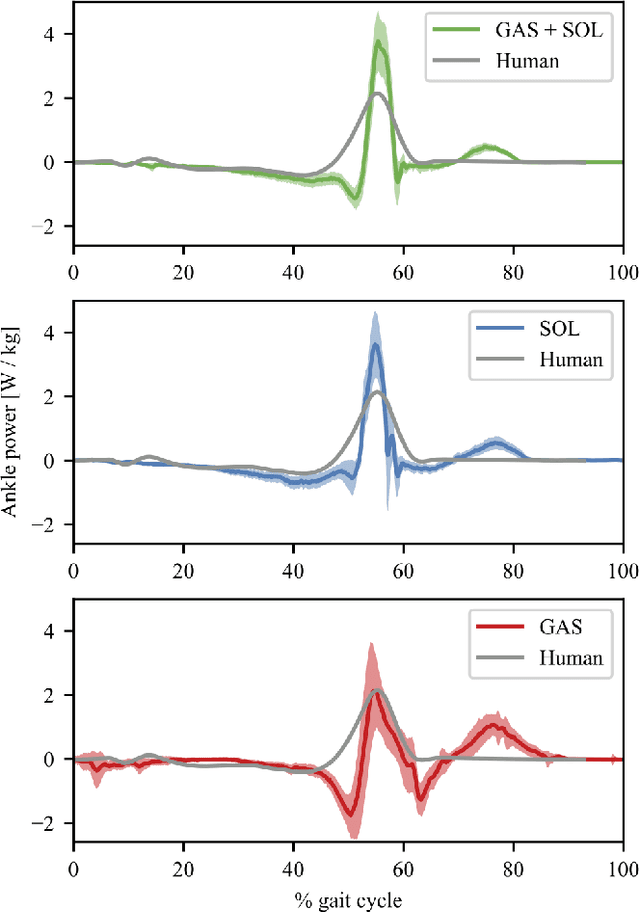
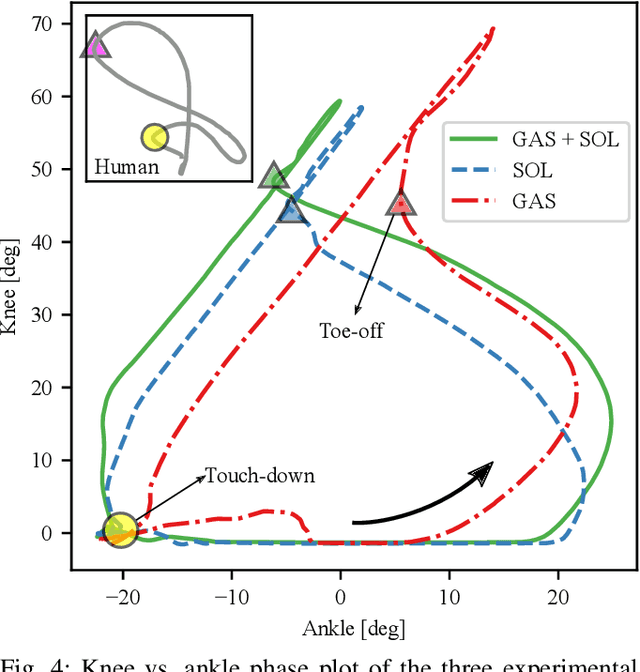
Legged locomotion in humans is influenced by mechanics and neural control. One mechanism assumed to contribute to the high efficiency of human walking is the impulsive ankle push-off, which potentially powers the human swing leg catapult. However, the mechanics of the human's lower leg with its complex muscle-tendon units spanning over single and multiple joints is not yet understood. Legged robots allow testing the interaction between complex leg mechanics, control, and environment in real-world walking gait. We custom developed a small, 2.2 kg human-like bipedal robot with soleus and gastrocnemius muscles represented by linear springs, acting as mono- and biarticular elasticities around the robot's ankle and knee joints. We tested the influence of three soleus and gastrocnemius spring configurations on the ankle power curves, on the synchronization of the ankle and knee joint movements, on the total cost of transport, and on walking speed. We controlled the robot with a feed-forward central pattern generator, leading to walking speeds between 0.35 m/s and 0.57 m/s at 1.0 Hz locomotion frequency, at 0.35 m leg length. We found differences between all three configurations; the soleus spring supports the robot's speed and energy efficiency by ankle power amplification, while the GAS spring facilitates the synchronization between knee and ankle joints during push-off.