 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePower to the springs: Passive elements are sufficient to drive push-off in human walking
Paper and Code
Apr 29, 2022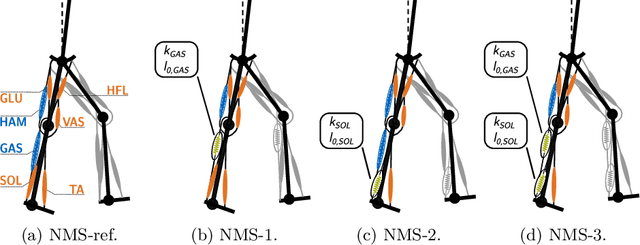
For the impulsive ankle push-off (APO) observed in human walking two muscle-tendon-units (MTUs) spanning the ankle joint play an important role: Gastrocnemius (GAS) and Soleus (SOL). GAS and SOL load the Achilles tendon to store elastic energy during stance followed by a rapid energy release during APO. We use a neuromuscular simulation (NMS) and a bipedal robot to investigate the role of GAS and SOL on the APO. We optimize the simulation for a robust gait and then sequentially replace the MTUs of (1) GAS, (2) SOL and (3) GAS and SOL by linear springs. To validate the simulation, we implement NMS-3 on a bipedal robot. Simulation and robot walk steady for all trials showing an impulsive APO. Our results imply that the elastic MTU properties shape the impulsive APO. For prosthesis or robot design that is, no complex ankle actuation is needed to obtain an impulsive APO, if more mechanical intelligence is incorporated in the design.