 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing the Expressivity of Temporal Graph Networks through Source-Target Identification
Nov 06, 2024Despite the successful application of Temporal Graph Networks (TGNs) for tasks such as dynamic node classification and link prediction, they still perform poorly on the task of dynamic node affinity prediction -- where the goal is to predict `how much' two nodes will interact in the future. In fact, simple heuristic approaches such as persistent forecasts and moving averages over \emph{ground-truth labels} significantly and consistently outperform TGNs. Building on this observation, we find that computing heuristics \textit{over messages} is an equally competitive approach, outperforming TGN and all current temporal graph (TG) models on dynamic node affinity prediction. In this paper, we prove that no formulation of TGN can represent persistent forecasting or moving averages over messages, and propose to enhance the expressivity of TGNs by adding source-target identification to each interaction event message. We show that this modification is required to represent persistent forecasting, moving averages, and the broader class of autoregressive models over messages. Our proposed method, TGNv2, significantly outperforms TGN and all current TG models on all Temporal Graph Benchmark (TGB) dynamic node affinity prediction datasets.
On Graph Neural Network Ensembles for Large-Scale Molecular Property Prediction
Jun 29, 2021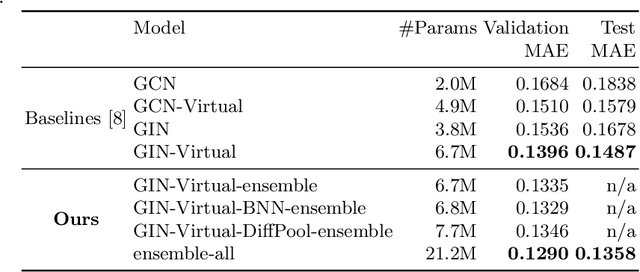
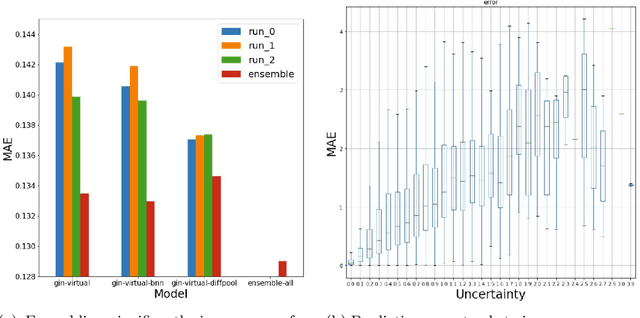
In order to advance large-scale graph machine learning, the Open Graph Benchmark Large Scale Challenge (OGB-LSC) was proposed at the KDD Cup 2021. The PCQM4M-LSC dataset defines a molecular HOMO-LUMO property prediction task on about 3.8M graphs. In this short paper, we show our current work-in-progress solution which builds an ensemble of three graph neural networks models based on GIN, Bayesian Neural Networks and DiffPool. Our approach outperforms the provided baseline by 7.6%. Moreover, using uncertainty in our ensemble's prediction, we can identify molecules whose HOMO-LUMO gaps are harder to predict (with Pearson's correlation of 0.5181). We anticipate that this will facilitate active learning.