 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAda-Detector: Adaptive Frontier Detector for Rapid Exploration
Apr 13, 2022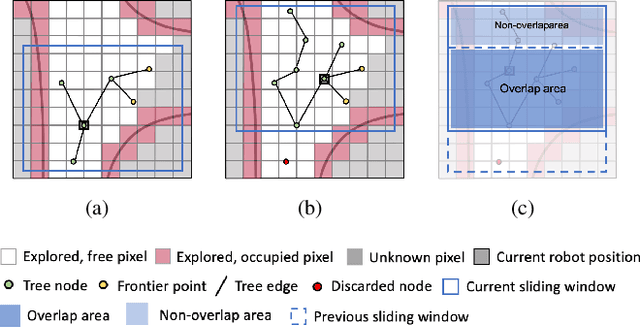
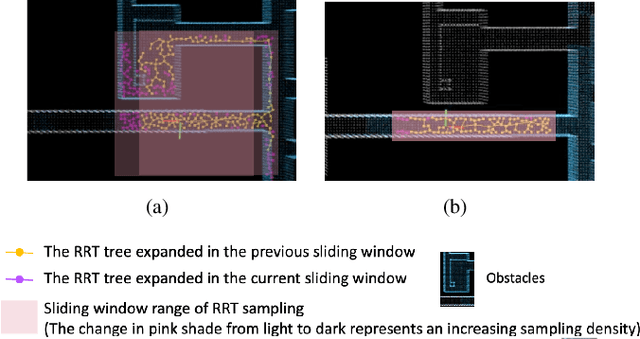
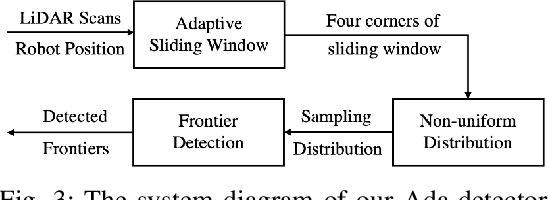
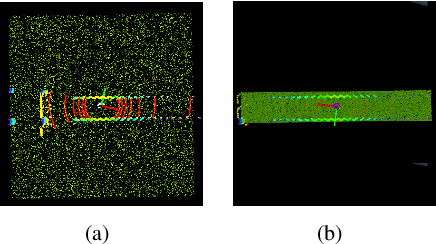
In this paper, we propose an efficient frontier detector method based on adaptive Rapidly-exploring Random Tree (RRT) for autonomous robot exploration. Robots can achieve real-time incremental frontier detection when they are exploring unknown environments. First, our detector adaptively adjusts the sampling space of RRT by sensing the surrounding environment structure. The adaptive sampling space can greatly improve the successful sampling rate of RRT (the ratio of the number of samples successfully added to the RRT tree to the number of sampling attempts) according to the environment structure and control the expansion bias of the RRT. Second, by generating non-uniform distributed samples, our method also solves the over-sampling problem of RRT in the sliding windows, where uniform random sampling causes over-sampling in the overlap area between two adjacent sliding windows. In this way, our detector is more inclined to sample in the latest explored area, which improves the efficiency of frontier detection and achieves incremental detection. We validated our method in three simulated benchmark scenarios. The experimental comparison shows that we reduce the frontier detection runtime by about 40% compared with the SOTA method, DSV Planner.
LiDAR Road-Atlas: An Efficient Map Representation for General 3D Urban Environment
Apr 12, 2022
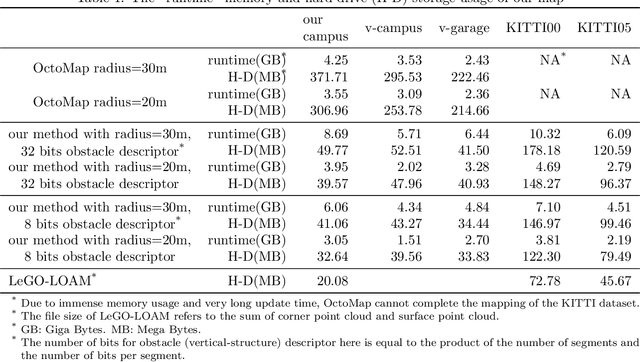

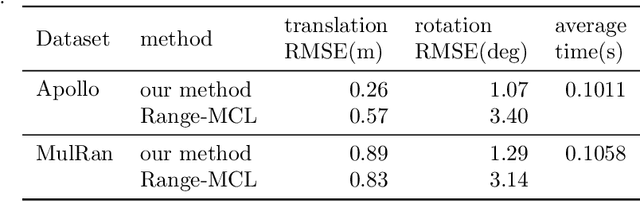
In this work, we propose the LiDAR Road-Atlas, a compactable and efficient 3D map representation, for autonomous robot or vehicle navigation in general urban environment. The LiDAR Road-Atlas can be generated by an online mapping framework based on incrementally merging local 2D occupancy grid maps (2D-OGM). Specifically, the contributions of our LiDAR Road-Atlas representation are threefold. First, we solve the challenging problem of creating local 2D-OGM in non-structured urban scenes based on a real-time delimitation of traversable and curb regions in LiDAR point cloud. Second, we achieve accurate 3D mapping in multiple-layer urban road scenarios by a probabilistic fusion scheme. Third, we achieve very efficient 3D map representation of general environment thanks to the automatic local-OGM induced traversable-region labeling and a sparse probabilistic local point-cloud encoding. Given the LiDAR Road-Atlas, one can achieve accurate vehicle localization, path planning and some other tasks. Our map representation is insensitive to dynamic objects which can be filtered out in the resulting map based on a probabilistic fusion. Empirically, we compare our map representation with a couple of popular map representation methods in robotics and autonomous driving societies, and our map representation is more favorable in terms of efficiency, scalability and compactness. In addition, we also evaluate localization accuracy extensively given the created LiDAR Road-Atlas representations on several public benchmark datasets. With a 16-channel LiDAR sensor, our method achieves an average global localization errors of 0.26m (translation) and 1.07 degrees (rotation) on the Apollo dataset, and 0.89m (translation) and 1.29 degrees (rotation) on the MulRan dataset, respectively, at 10Hz, which validates the promising performance of our map representation for autonomous driving.
Frontier Detection and Reachability Analysis for Efficient 2D Graph-SLAM Based Active Exploration
Sep 07, 2020


We propose an integrated approach to active exploration by exploiting the Cartographer method as the base SLAM module for submap creation and performing efficient frontier detection in the geometrically co-aligned submaps induced by graph optimization. We also carry out analysis on the reachability of frontiers and their clusters to ensure that the detected frontier can be reached by robot. Our method is tested on a mobile robot in real indoor scene to demonstrate the effectiveness and efficiency of our approach.